10. 源码级应用开发 #
注:
本章节使用SDK1.1.0版本和nncase2.4.0版本实现,后续更改请参考: kendryte/K230_training_scripts (github.com)。
开发时需要注意版本对应,k230_sdk版本和nncase版本对应关系参考链接:K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)。
相关教学视频,见参考章节链接。
该应用可在Linux+RT-Smart双系统和纯RT-Smart单系统运行。
本章节介绍了KTS(k230_training_scripts)工具的使用方法和模型上板部署过程。KTS提供了分类、检测、翻译、关键词唤醒共四个任务从训练到部署的源码,覆盖cv、nlp、语音等多个模态。用户对源码可见,感兴趣的用户可以对源码进行修改,实现更换数据集、更换模型等部分。本工具适合对深度学习的不同模态的任务有比较成熟的了解,并希望使用k230开发板完成部署的用户。
10.1 使用KTS实现图像分类任务#
k230_training_scripts(KTS)提供了源码级的详细的k230开发案例,覆盖cv、nlp和audio相关的AI任务。KTS的github地址:kendryte/K230_training_scripts (github.com)。KTS相比于上面的两个工具更为灵活,对用户的代码能力要求也更高,用户可以自行修改配置对应步骤,用户可以更换模型,调整参数,从源码实现k230应用的快速开发和部署。
使用KTS进行AI开发需要实现环境搭建、数据准备、模型训练和测试、CANMV k230镜像编译和烧录、C++代码编译、网络配置和文件传输、k230端部署等环节。以蔬菜分类场景为例,代码参见:kendryte/K230_training_scripts。
10.1.1 环境搭建#
(1)Linux系统;
(2)安装显卡驱动;
(3)安装Anaconda,用于创建模型训练环境;
(4)安装Docker,用于创建SDK镜像编译环境;
(5)安装dotnet SDK;
10.1.2 数据准备#
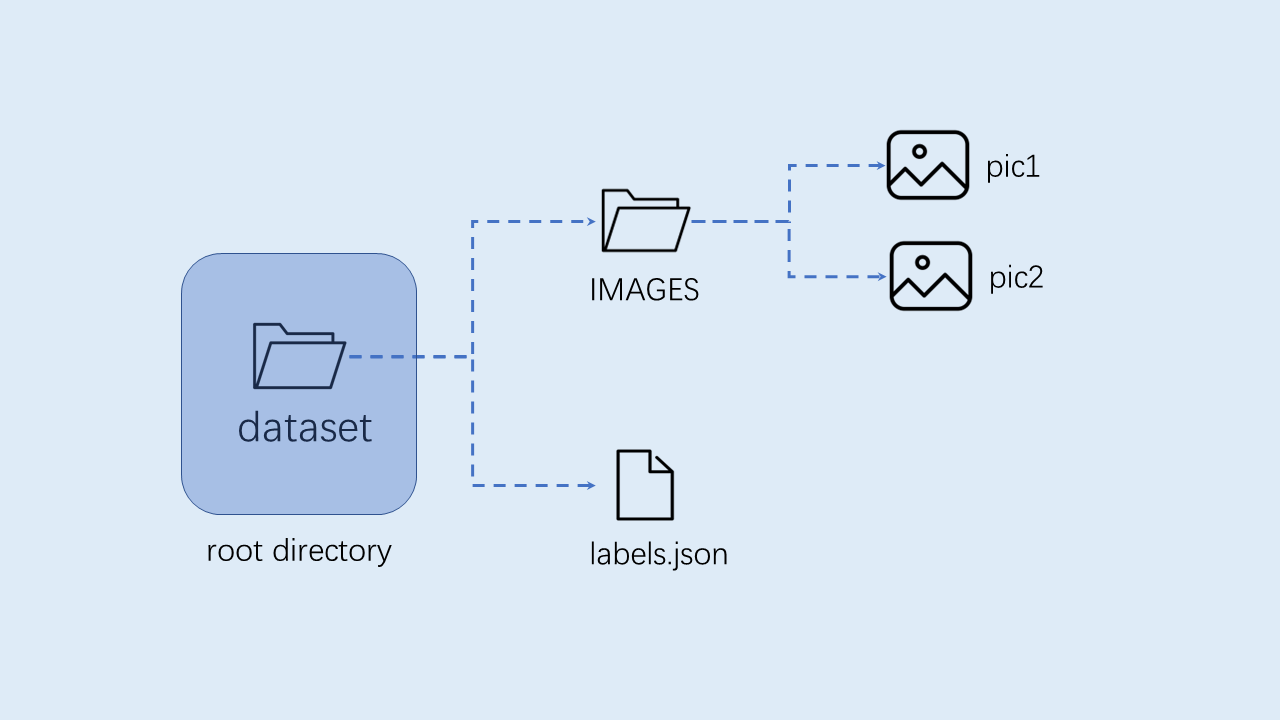
图像分类任务自定义数据集按照如下图格式组织:
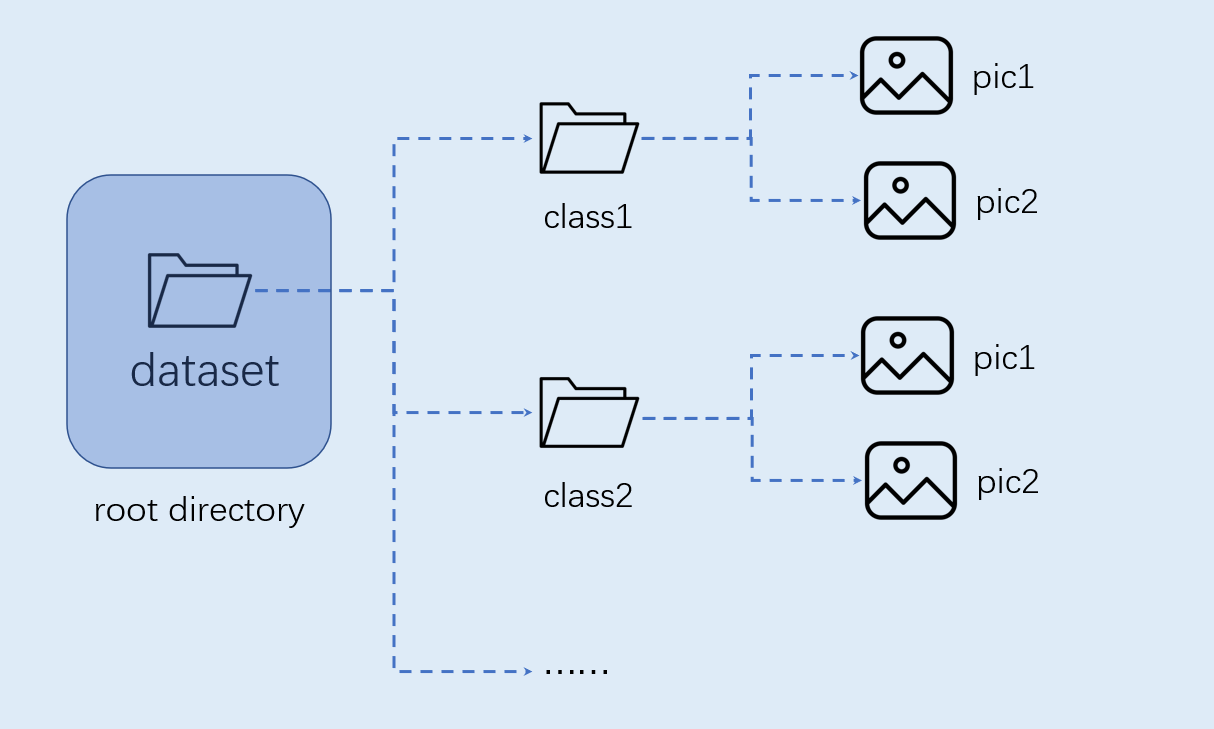
注意:图像分类必须按照上述格式进行组织。
10.1.3 模型训练和测试#
本节内容在训练环境中实现。
10.1.3.1 创建虚拟环境#
开启命令终端:
conda create -n myenv python=3.9
conda activate myenv
10.1.3.2 安装python依赖库#
按照项目内的requriements.txt安装训练所用的python库,等待安装:
pip install -r requriements.txt
在requriments.txt中会安装模型转换的包nncase和nncase-kpu,nncase 是一个为 AI 加速器设计的神经网络编译器。
编译镜像和使用nncase转换kmodel时请注意版本对应关系,k230_sdk版本和nncase版本对应关系参考下述链接:
K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)
您可以按照对应版本更换nncase和nncase-kpu的版本,比如更换nncase版本为2.7.0:
pip install nncase==2.7.0
pip install nncase-kpu==2.7.0
10.1.3.3 配置训练参数#
给出的训练脚本中配置文件yaml/config.yaml设置如下:
dataset:
root_folder: ../data/veg_cls # 分类数据集路径
split: true # 是否重新执行拆分,第一次执行必须为true
train_ratio: 0.7 # 训练集比例
val_ratio: 0.15 # 验证集比例
test_ratio: 0.15 # 测试集比例
train:
device: cuda
txt_path: ../gen # 拆分过程生成的训练集、验证集、测试集txt文件,标签名称文件、校正集文件
image_size: [ 224,224 ] # 分辨率
mean: [ 0.485, 0.456, 0.406 ]
std: [ 0.229, 0.224, 0.225 ]
epochs: 10
batchsize: 8
learningrate: 0.001
save_path: ../checkpoints # 模型保存路径
inference:
mode: image # 推理模式,分为image和video; image模式下可推理单张图片和目录下所有图片,video调用摄像头实现推理
inference_model: best # 分为best和last,分别调用checkpoints下的best.pth和last.pth进行推理
images_path: ../data/veg_cls/bocai # 如果该路径为图片路径,则进行单张图片推理;如果该路径为目录,则对目录下所有图片进行推理
deploy:
chip: k230 # 芯片类型,分为“k230”和“cpu”两种
ptq_option: 0 # 量化类型,0为uint8,1,2,3,4为uint16的不同形式
10.1.3.4 模型训练#
进入到工程的scripts目录,执行训练代码:
python3 main.py
如果训练成功,在配置文件的model_save_dir目录下可以找到训练好的last.pth、best.pth、best.onnx、best.kmodel。
10.1.3.5 模型测试#
设置配置文件中的inference部分,设置测试配置,执行测试代码:
python3 inference.py
10.1.3.6 准备文件#
后面部署步骤需要用到的文件包括:
(1)checkpoints/best.kmodel;
(2)gen/labels.txt;
(3)待测试图片test.jpg;
10.1.4 K230_SDK镜像编译和烧录#
编译镜像和使用nncase转换kmodel时请注意版本对应关系,k230_sdk版本和nncase版本对应关系参考下述链接:
K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)
如果您选择使用嘉楠开发者社区 (canaan-creative.com)资料下载->K230->Images部分提供的镜像,请您注意版本对应关系下载烧录。
10.1.4.1 Docker环境搭建#
# 下载docker编译镜像
docker pull ghcr.io/kendryte/k230_sdk
# 可以使用以下命令确认docker镜像是否拉取成功
docker images | grep ghcr.io/kendryte/k230_sdk
# 下载sdk源码
git clone https://github.com/kendryte/k230_sdk.git
cd k230_sdk
# 下载工具链Linux和RT-Smart toolchain, buildroot package, AI package等
make prepare_sourcecode
# 创建docker容器,$(pwd):$(pwd)表示系统当前目录映射到docker容器内部的相同目录下,将系统下的工具链目录映射到docker容器内部的/opt/toolchain目录下
docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) ghcr.io/kendryte/k230_sdk /bin/bash
10.1.4.2 镜像编译#
请在k230_sdk根目录下按照不同的系统需求执行下述命令:
# (1)如果选择自行编译Linux+RT-Smart双系统镜像,执行下述命令
make CONF=k230_canmv_defconfig
# (2)如果选择使用开发者社区下载的Linux+RT-Smart双系统镜像,请务必在k230_sdk根目录下执行如下命令以指定开发板类型
make mpp
make CONF=k230_canmv_defconfig prepare_memory
# (3)如果选择自行编译纯RT-Smart系统镜像,执行下述命令,开发者社区暂未开放纯RT-Smart镜像下载
make CONF=k230_canmv_only_rtt_defconfig
编译产物如下:
请您耐心等待镜像编译成功,
make mpp过程相比完整镜像编译过程耗时较少。对于Linux+RT-Smart双系统编译,在k230_sdk根目录/output/k230_canmv_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_defconfig/images ├── big-core ├── little-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
对于RT-Smart单系统编译,在k230_sdk根目录/output/k230_canmv_only_rtt_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_only_rtt_defconfig/images ├── big-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
10.1.4.3 镜像烧录#
CANMV K230 支持SDCard启动方式。为方便开发,建议您准备一张TF卡(Micro SD卡)。
Linux:
在SD卡插到宿主机之前,输入:
ls -l /dev/sd\*
查看当前的存储设备。
将TF卡插入宿主机后,再次输入:
ls -l /dev/sd\*
查看此时的存储设备,新增加的就是TF卡设备节点。
假设/dev/sdc就是TF卡设备节点,执行如下命令烧录TF卡:
sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync
Windows:
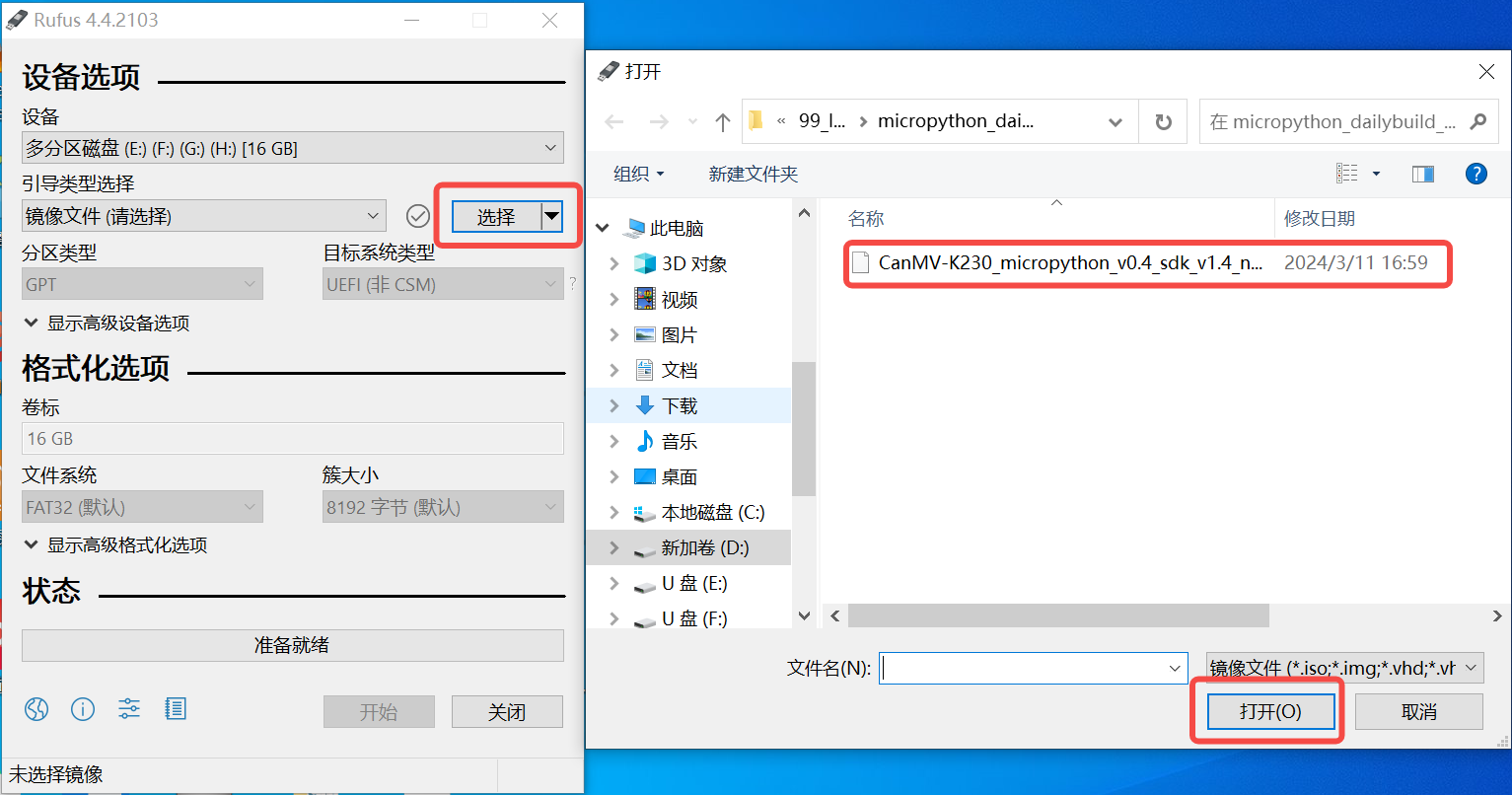
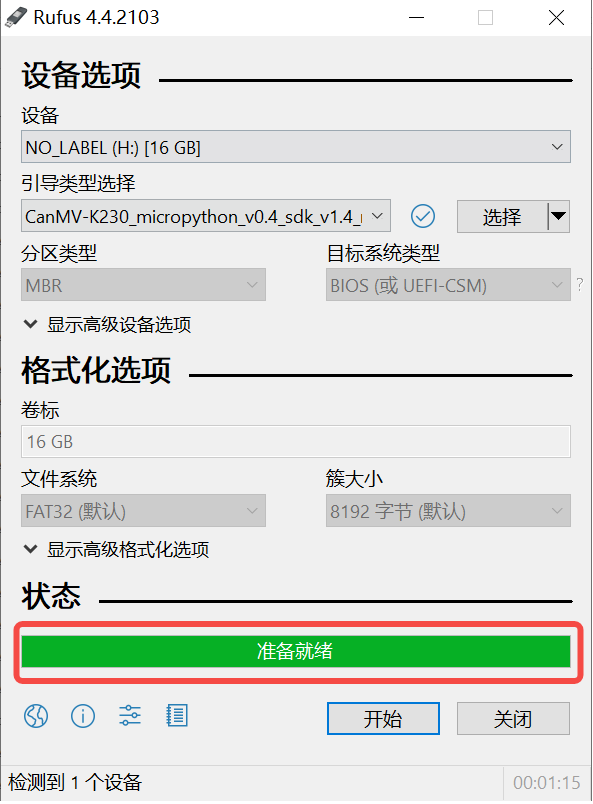
Windows下可通过rufus工具对TF卡进行烧录,rufus工具下载地址。
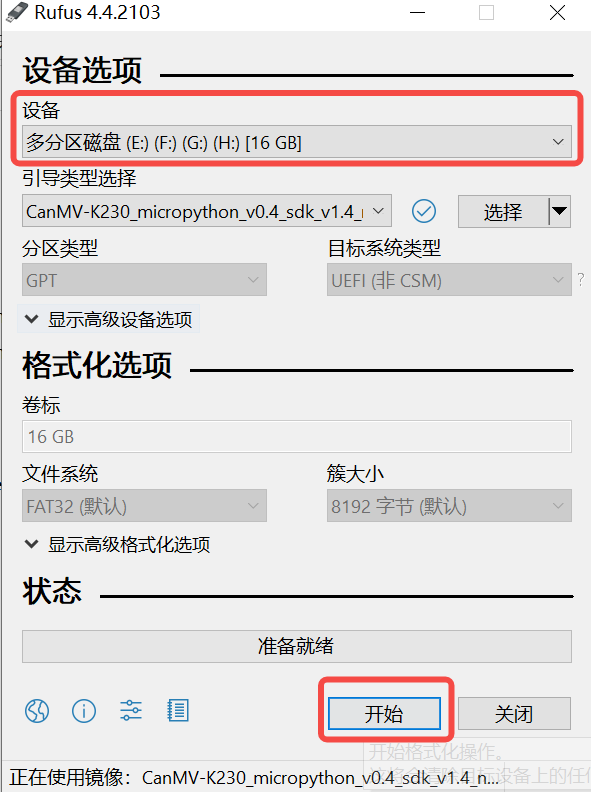
1)将SD卡插入PC,然后启动rufus工具,点击工具界面的”选择”按钮,选择待烧写的固件。
2)点击“开始”按钮开始烧写,烧写过程有进度条展示,烧写结束后会提示“准备就绪”。
10.1.4.4 上电启动开发板#
安装MobaXterm实现串口通信,MobaXterm下载地址:https://mobaxterm.mobatek.net。
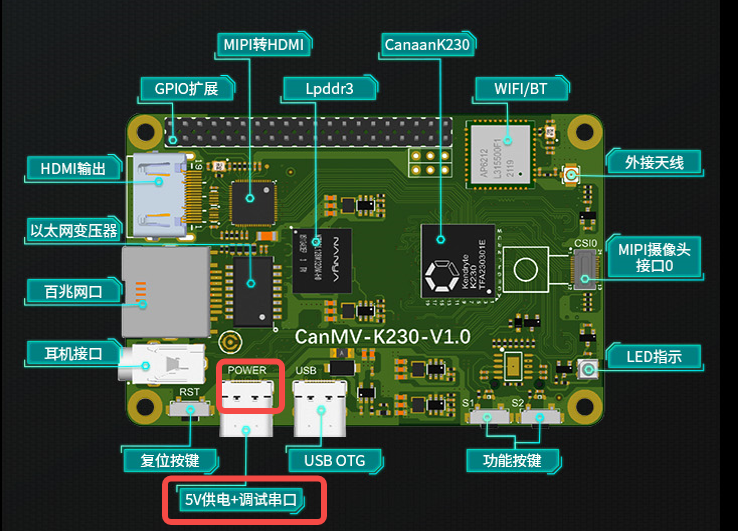
将烧录完成的SD卡插入进开板板卡槽中,HDMI输出连显示器,百兆网口连以太网,POWER连串口并供电。
对于Linux+RT-Smart双系统镜像,系统上电后,默认会有两个串口设备,可分别用于访问小核Linux和大核RT-Smart,小核Linux默认用户名root,密码为空。大核RT-Smart系统中开机会自动启动一个应用程序,可按q键退出至命令提示符终端。
对于纯RT-Smart单系统镜像,系统上电后,大核RT-Smart系统中开机会自动启动一个应用程序,可按q键退出至命令提示符终端。
10.1.5 C++代码编译#
完成上述开发板的准备工作后,我们可以使用C++编写自己的代码,下面以图像分类任务为例,给出相关图像分类任务的示例代码,并进行解析。示例代码参考:kendryte/K230_training_scripts。
10.1.5.1 代码结构#
k230_code
├── cmake
│ ├── link.lds #链接脚本
│ ├── Riscv64.cmake
├── k230_deploy
│ ├── ai_base.cc # 模型部署基类实现
│ ├── ai_base.h # 模型部署基类,封装了nncase加载、input设置、模型推理、获取output操作,后续具体任务开发只需关注模型的前处理、后处理即可
│ ├── classification.cc # 图像分类code类实现
│ ├── classification.h # 图像分类任务类定义,继承AIBase,用于封装模型推理的前后处理
│ ├── main.cc # 主函数,参数解析,初始化Classification类示例,实现上板功能
│ ├── scoped_timing.hpp # 时间测试工具
│ ├── utils.cc # 工具类实现
│ ├── utils.h # 工具类, 封装了图像预处理和图像分类的常用函数,包括读取二进制文件、保存图片、图像处理、结果绘制等,用户可根据自己需求丰富该文件
│ ├── vi_vo.h # 视频输入输出头文件
│ ├── CMakeLists.txt # CMake脚本用于构建一个使用C/C++源文件的可执行文件,并链接到各种库
├── build_app.sh # 编译脚本,使用交叉编译工具链编译k230_deploy工程
└── CMakeLists.txt # CMake脚本用于构建 nncase_sdk 的项目工程
10.1.5.2 核心代码#
当您得到kmodel模型之后,具体AI上板代码包括:sensor&display初始化、kmodel加载、模型输入输出设置、获取图像、输入数据加载、输入数据预处理、模型推理、模型输出获取、输出后处理、OSD显示等步骤。如图所示:
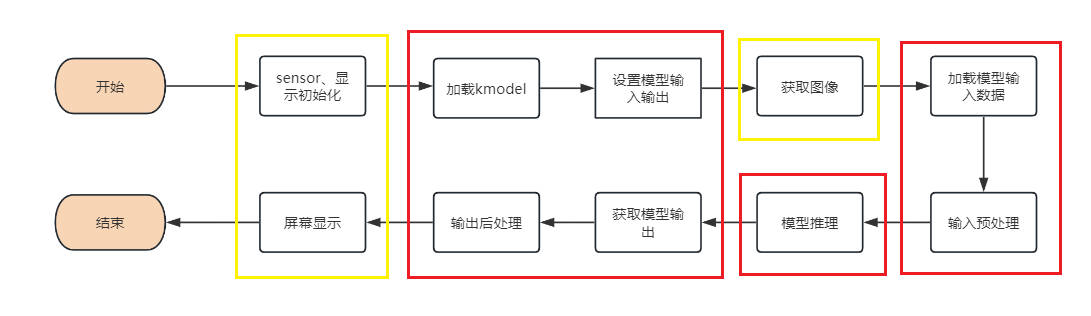
图中黄框部分在vi_vo.h中给出了给出了接口,下面针对红框部分,介绍如何实现AI应用开发。
在上述过程中,kmodel加载、模型输入设置、模型推理、模型输出获取是所有任务的共有步骤。我们对此做了封装,ai_base.h和ai_base.cc可以直接拷贝使用。
ai_base.h定义了AIBase基类以及共有操作的接口:
#ifndef AI_BASE_H
#define AI_BASE_H
#include <vector>
#include <string>
#include <fstream>
#include <nncase/runtime/interpreter.h>
#include "scoped_timing.hpp"
using std::string;
using std::vector;
using namespace nncase::runtime;
/**
* @brief AI基类,封装nncase相关操作
* 主要封装了nncase的加载、设置输入、运行、获取输出操作,后续开发demo只需要关注模型的前处理、后处理即可
*/
class AIBase
{
public:
/**
* @brief AI基类构造函数,加载kmodel,并初始化kmodel输入、输出
* @param kmodel_file kmodel文件路径
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)None
* @return None
*/
AIBase(const char *kmodel_file,const string model_name, const int debug_mode = 1);
/**
* @brief AI基类析构函数
* @return None
*/
~AIBase();
/**
* @brief 设置kmodel输入
* @param buf 输入数据指针
* @param size 输入数据大小
* @return None
*/
void set_input(const unsigned char *buf, size_t size);
/**
* @brief 根据索引获取kmodel输入tensor
* @param idx 输入数据索引
* @return None
*/
runtime_tensor get_input_tensor(size_t idx);
/**
* @brief 设置模型的输入tensor
* @param idx 输入数据索引
* @param tensor 输入tensor
*/
void set_input_tensor(size_t idx, runtime_tensor &tensor);
/**
* @brief 初始化kmodel输出
* @return None
*/
void set_output();
/**
* @brief 推理kmodel
* @return None
*/
void run();
/**
* @brief 获取kmodel输出,结果保存在对应的类属性中
* @return None
*/
void get_output();
protected:
string model_name_; // 模型名字
int debug_mode_; // 调试模型,0(不打印),1(打印时间),2(打印所有)
vector<float *> p_outputs_; // kmodel输出对应的指针列表
vector<vector<int>> input_shapes_; //{{N,C,H,W},{N,C,H,W}...}
vector<vector<int>> output_shapes_; //{{N,C,H,W},{N,C,H,W}...}} 或 {{N,C},{N,C}...}}等
vector<int> each_input_size_by_byte_; //{0,layer1_length,layer1_length+layer2_length,...}
vector<int> each_output_size_by_byte_; //{0,layer1_length,layer1_length+layer2_length,...}
private:
/**
* @brief 首次初始化kmodel输入,并获取输入shape
* @return None
*/
void set_input_init();
/**
* @brief 首次初始化kmodel输出,并获取输出shape
* @return None
*/
void set_output_init();
vector<unsigned char> kmodel_vec_; // 通过读取kmodel文件得到整个kmodel数据,用于传给kmodel解释器加载kmodel
interpreter kmodel_interp_; // kmodel解释器,从kmodel文件构建,负责模型的加载、输入输出设置和推理
};
#endif
ai_base.cc是ai_base.h中定义所有接口的具体实现。
/*
ai_base.h中AIBase类定义接口的具体实现
*/
#include "ai_base.h"
#include <iostream>
#include <cassert>
#include "utils.h"
using std::cout;
using std::endl;
using namespace nncase;
using namespace nncase::runtime::detail;
/*AIBase构造函数*/
AIBase::AIBase(const char *kmodel_file,const string model_name, const int debug_mode) : debug_mode_(debug_mode),model_name_(model_name)
{
if (debug_mode > 1)
cout << "kmodel_file:" << kmodel_file << endl;
std::ifstream ifs(kmodel_file, std::ios::binary);//读入kmodel
kmodel_interp_.load_model(ifs).expect("Invalid kmodel");//kmodel解释器加载kmodel
set_input_init();
set_output_init();
}
/*析构函数*/
AIBase::~AIBase()
{
}
/*
首次初始化kmodel输入
*/
void AIBase::set_input_init()
{
ScopedTiming st(model_name_ + " set_input init", debug_mode_);//计时
int input_total_size = 0;
each_input_size_by_byte_.push_back(0);
for (int i = 0; i < kmodel_interp_.inputs_size(); ++i)
{
auto desc = kmodel_interp_.input_desc(i);//索引为i的输入描述
auto shape = kmodel_interp_.input_shape(i);//索引为i的输入shape
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");//创建输入tensor
kmodel_interp_.input_tensor(i, tensor).expect("cannot set input tensor");//绑定tensor到模型输入
vector<int> in_shape = {shape[0], shape[1], shape[2], shape[3]};
input_shapes_.push_back(in_shape);//存储输入shape
int dsize = shape[0] * shape[1] * shape[2] * shape[3];//输入总字节数
if (debug_mode_ > 1)
cout << "input shape:" << shape[0] << " " << shape[1] << " " << shape[2] << " " << shape[3] << endl;
if (desc.datatype == 0x06)//输入数据为uint8类型
{
input_total_size += dsize;
each_input_size_by_byte_.push_back(input_total_size);
}
else if (desc.datatype == 0x0B)//输入数据为float32类型
{
input_total_size += (dsize * 4);
each_input_size_by_byte_.push_back(input_total_size);
}
else
assert(("kmodel input data type supports only uint8, float32", 0));
}
each_input_size_by_byte_.push_back(input_total_size); // 最后一个保存总大小
}
/*
设置模型的输入数据,加载模型输入的具体数据
*/
void AIBase::set_input(const unsigned char *buf, size_t size)
{
//检查输入数据大小是否和模型要求大小相匹配
if (*each_input_size_by_byte_.rbegin() != size)
cout << "set_input:the actual input size{" + std::to_string(size) + "} is different from the model's required input size{" + std::to_string(*each_input_size_by_byte_.rbegin()) + "}" << endl;
assert((*each_input_size_by_byte_.rbegin() == size));
//计时
ScopedTiming st(model_name_ + " set_input", debug_mode_);
//循环遍历模型输入
for (size_t i = 0; i < kmodel_interp_.inputs_size(); ++i)
{
//获取模型的输入描述和形状
auto desc = kmodel_interp_.input_desc(i);
auto shape = kmodel_interp_.input_shape(i);
//创建tensor
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");
//将输入tensor映射到可写区域
auto mapped_buf = std::move(hrt::map(tensor, map_access_::map_write).unwrap()); // mapped_buf实际是有缓存数据的
//拷贝数据到tensor的缓冲区
memcpy(reinterpret_cast<void *>(mapped_buf.buffer().data()), buf, each_input_size_by_byte_[i + 1] - each_input_size_by_byte_[i]);
//解除映射
auto ret = mapped_buf.unmap();
ret = hrt::sync(tensor, sync_op_t::sync_write_back, true);
if (!ret.is_ok())
{
std::cerr << "hrt::sync failed" << std::endl;
std::abort();
}
//将tensor和模型的输入绑定
kmodel_interp_.input_tensor(i, tensor).expect("cannot set input tensor");
}
}
/*
按照索引获取模型的输入tensor
*/
runtime_tensor AIBase::get_input_tensor(size_t idx)
{
return kmodel_interp_.input_tensor(idx).expect("cannot get input tensor");
}
/*
按照索引设置模型的输入tensor
*/
void AIBase::set_input_tensor(size_t idx, runtime_tensor &tensor)
{
ScopedTiming st(model_name_ + " set_input_tensor", debug_mode_);
kmodel_interp_.input_tensor(idx, tensor).expect("cannot set input tensor");
}
/*
首次初始化kmodel输出
*/
void AIBase::set_output_init()
{
//计时
ScopedTiming st(model_name_ + " set_output_init", debug_mode_);
each_output_size_by_byte_.clear();
int output_total_size = 0;
each_output_size_by_byte_.push_back(0);
//循环遍历模型的输出
for (size_t i = 0; i < kmodel_interp_.outputs_size(); i++)
{
//获取输出描述和形状
auto desc = kmodel_interp_.output_desc(i);
auto shape = kmodel_interp_.output_shape(i);
vector<int> out_shape;
int dsize = 1;
for (int j = 0; j < shape.size(); ++j)
{
out_shape.push_back(shape[j]);
dsize *= shape[j];
if (debug_mode_ > 1)
cout << shape[j] << ",";
}
if (debug_mode_ > 1)
cout << endl;
output_shapes_.push_back(out_shape);
//获取数据的总大小
if (desc.datatype == 0x0B)
{
output_total_size += (dsize * 4);
each_output_size_by_byte_.push_back(output_total_size);
}
else
assert(("kmodel output data type supports only float32", 0));
//创建tensor
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
//将tensor和模型的输出绑定
kmodel_interp_.output_tensor(i, tensor).expect("cannot set output tensor");
}
}
/*
设置kmodel模型的输出
*/
void AIBase::set_output()
{
ScopedTiming st(model_name_ + " set_output", debug_mode_);
//循环将输出tensor和模型的输出绑定
for (size_t i = 0; i < kmodel_interp_.outputs_size(); i++)
{
auto desc = kmodel_interp_.output_desc(i);
auto shape = kmodel_interp_.output_shape(i);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
kmodel_interp_.output_tensor(i, tensor).expect("cannot set output tensor");
}
}
/*
调用kmodel_interp_.run()实现模型推理
*/
void AIBase::run()
{
ScopedTiming st(model_name_ + " run", debug_mode_);
kmodel_interp_.run().expect("error occurred in running model");
}
/*
获取模型的输出(float指针形式,后处理时由后处理的具体要求取出),为后续后处理做准备
*/
void AIBase::get_output()
{
ScopedTiming st(model_name_ + " get_output", debug_mode_);
//p_outputs_存储模型的输出的指针,可以有多个输出
p_outputs_.clear();
for (int i = 0; i < kmodel_interp_.outputs_size(); i++)
{
//获取输出tensor
auto out = kmodel_interp_.output_tensor(i).expect("cannot get output tensor");
//将输出tensor映射到主机内存
auto buf = out.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
//将映射后的数据转换为float指针
float *p_out = reinterpret_cast<float *>(buf.data());
p_outputs_.push_back(p_out);
}
}
不同任务场景的前处理和后处理有所不同,比如分类使用softmax计算类别概率,目标检测要做nms;因此您可以定义您的任务场景类继承AIBase类,将针对该任务的前处理和后处理代码进行封装。以图像分类为例:
classification.h中的Classification类继承自AIBase类,实现了图像分类任务的类定义,主要定义了图像分类模型的前处理、推理、后处理接口。初始化ai2d构建器实现图像预处理。还定义了一些图像分类任务的变量,比如分类阈值、类别名称、类别数等。
#ifndef _CLASSIFICATION_H
#define _CLASSIFICATION_H
#include "utils.h"
#include "ai_base.h"
/**
* @brief 分类任务
* 主要封装了对于每一帧图片,从预处理、运行到后处理给出结果的过程
*/
class Classification : public AIBase
{
public:
/**
* @brief Classification构造函数,加载kmodel,并初始化kmodel输入、输出分类阈值
* @param kmodel_path kmodel路径
* @param image_path 推理图片路径(静态图使用)
* @param labels 类别名称列表
* @param cls_thresh 分类阈值
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)
* @return None
*/
Classification(string &kmodel_path, string &image_path,std::vector<std::string> labels, float cls_thresh,const int debug_mode);
/**
* @brief Classification构造函数,加载kmodel,并初始化kmodel输入、输出分类阈值
* @param kmodel_path kmodel路径
* @param image_path 推理图片路径(静态图使用)
* @param labels 类别名称列表
* @param cls_thresh 分类阈值
* @param isp_shape isp输入大小(chw)
* @param vaddr isp对应虚拟地址
* @param paddr isp对应物理地址
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)
* @return None
*/
Classification(string &kmodel_path, string &image_path,std::vector<std::string> labels,float cls_thresh, FrameCHWSize isp_shape, uintptr_t vaddr, uintptr_t paddr,const int debug_mode);
/**
* @brief Classification析构函数
* @return None
*/
~Classification();
/**
* @brief 静态图片预处理
* @param ori_img 原始图片
* @return None
*/
void pre_process(cv::Mat ori_img);
/**
* @brief 视频流预处理(ai2d for isp)
* @return None
*/
void pre_process();
/**
* @brief kmodel推理
* @return None
*/
void inference();
/**
* @brief kmodel推理结果后处理
* @param results 后处理之后的基于原始图像的分类结果集合
* @return None
*/
void post_process(vector<cls_res> &results);
private:
/**
* @brief 计算exp
* @param x 自变量值
* @return 返回计算exp后的结果
*/
float fast_exp(float x);
/**
* @brief 计算sigmoid
* @param x 自变量值
* @return 返回计算sigmoid后的结果
*/
float sigmoid(float x);
std::unique_ptr<ai2d_builder> ai2d_builder_; // ai2d构建器
runtime_tensor ai2d_in_tensor_; // ai2d输入tensor
runtime_tensor ai2d_out_tensor_; // ai2d输出tensor
uintptr_t vaddr_; // isp的虚拟地址
FrameCHWSize isp_shape_; // isp对应的地址大小
float cls_thresh; //分类阈值
vector<string> labels; //类别名字
int num_class; //类别数
float* output; //读取kmodel输出,float指针类型
};
#endif
在classification.cc中实现上述接口:
#include "classification.h"
/*
静态图推理,构造函数
*/
Classification::Classification(std::string &kmodel_path, std::string &image_path,std::vector<std::string> labels_,float cls_thresh_,const int debug_mode)
:AIBase(kmodel_path.c_str(),"Classification", debug_mode)
{
cls_thresh=cls_thresh_;
labels=labels_;
num_class = labels.size();
ai2d_out_tensor_ = this -> get_input_tensor(0);//继承自AIBase的接口
}
/*
视频流推理,构造函数
*/
Classification::Classification(std::string &kmodel_path, std::string &image_path,std::vector<std::string> labels_,float cls_thresh_, FrameCHWSize isp_shape, uintptr_t vaddr, uintptr_t paddr,const int debug_mode)
:AIBase(kmodel_path.c_str(),"Classification", debug_mode)
{
cls_thresh=cls_thresh_;
labels=labels_;
num_class = labels.size();
vaddr_ = vaddr;
isp_shape_ = isp_shape;
dims_t in_shape{1, isp_shape.channel, isp_shape.height, isp_shape.width};
ai2d_in_tensor_ = hrt::create(typecode_t::dt_uint8, in_shape, hrt::pool_shared).expect("create ai2d input tensor failed");
ai2d_out_tensor_ = this -> get_input_tensor(0);
Utils::resize(ai2d_builder_, ai2d_in_tensor_, ai2d_out_tensor_);
}
/*
析构函数
*/
Classification::~Classification()
{
}
/*
静态图预处理函数
*/
void Classification::pre_process(cv::Mat ori_img)
{
//计时
ScopedTiming st(model_name_ + " pre_process image", debug_mode_);
std::vector<uint8_t> chw_vec;
//bgr转rgb,hwc转chw
Utils::bgr2rgb_and_hwc2chw(ori_img, chw_vec);
//resize
Utils::resize({ori_img.channels(), ori_img.rows, ori_img.cols}, chw_vec, ai2d_out_tensor_);
}
/*
视频流预处理,具体参见ai2d应用部分
*/
void Classification::pre_process()
{
ScopedTiming st(model_name_ + " pre_process video", debug_mode_);
size_t isp_size = isp_shape_.channel * isp_shape_.height * isp_shape_.width;
auto buf = ai2d_in_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
memcpy(reinterpret_cast<char *>(buf.data()), (void *)vaddr_, isp_size);
hrt::sync(ai2d_in_tensor_, sync_op_t::sync_write_back, true).expect("sync write_back failed");
ai2d_builder_->invoke(ai2d_in_tensor_, ai2d_out_tensor_).expect("error occurred in ai2d running");
}
/*
推理函数,run()和get_output()继承自AIBase
*/
void Classification::inference()
{
this->run();
this->get_output();
}
/*
后处理计算 exp
*/
float Classification::fast_exp(float x)
{
union {
uint32_t i;
float f;
} v{};
v.i = (1 << 23) * (1.4426950409 * x + 126.93490512f);
return v.f;
}
/*
后处理计算 sigmoid
*/
float Classification::sigmoid(float x)
{
return 1.0f / (1.0f + fast_exp(-x));
}
/*
后处理函数
*/
void Classification::post_process(vector<cls_res> &results)
{
ScopedTiming st(model_name_ + " post_process", debug_mode_);
//p_outputs_中存放的是float类型指针,指向输出
output = p_outputs_[0];
cls_res b;
//如果是多分类
if(num_class > 2){
float sum = 0.0;
for (int i = 0; i < num_class; i++){
sum += exp(output[i]);
}
b.score = cls_thresh;
int max_index;
//softmax处理
for (int i = 0; i < num_class; i++)
{
output[i] = exp(output[i]) / sum;
}
max_index = max_element(output,output+num_class) - output;
if (output[max_index] >= b.score)
{
b.label = labels[max_index];
b.score = output[max_index];
results.push_back(b);
}
}
else// 2分类
{
float pre = sigmoid(output[0]);
if (pre > cls_thresh)
{
b.label = labels[0];
b.score = pre;
}
else{
b.label = labels[1];
b.score = 1 - pre;
}
results.push_back(b);
}
}
在上述代码中的预处理部分,使用了一些工具函数,我们将其封装在utils.h中:
#ifndef UTILS_H
#define UTILS_H
#include <algorithm>
#include <vector>
#include <iostream>
#include <fstream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc.hpp>
#include <nncase/functional/ai2d/ai2d_builder.h>
#include <string>
#include <string.h>
#include <cmath>
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdint.h>
#include <random>
using namespace nncase;
using namespace nncase::runtime;
using namespace nncase::runtime::k230;
using namespace nncase::F::k230;
using namespace std;
using namespace cv;
using cv::Mat;
using std::cout;
using std::endl;
using std::ifstream;
using std::vector;
#define STAGE_NUM 3
#define STRIDE_NUM 3
#define LABELS_NUM 1
/**
* @brief 分类结果结构
*/
typedef struct cls_res
{
float score;//分类分数
string label;//分类标签结果
}cls_res;
/**
* @brief 单张/帧图片大小
*/
typedef struct FrameSize
{
size_t width; // 宽
size_t height; // 高
} FrameSize;
/**
* @brief 单张/帧图片大小
*/
typedef struct FrameCHWSize
{
size_t channel; // 通道
size_t height; // 高
size_t width; // 宽
} FrameCHWSize;
/**
* @brief AI工具类
* 封装AI常用的函数,包括二进制文件读取、文件保存、图片预处理等操作
*/
class Utils
{
public:
/**
* @brief 对图片resize
* @param ori_img 原始图片
* @param frame_size 需要resize图像的宽高
* @param padding 需要padding的像素,默认是cv::Scalar(104, 117, 123),BGR
* @return 处理后图像
*/
static cv::Mat resize(const cv::Mat ori_img, const FrameSize &frame_size);
/**
* @brief 将BGR图片从hwc转为chw
* @param ori_img 原始图片
* @param chw_vec 转为chw后的数据
* @return None
*/
static void bgr2rgb_and_hwc2chw(cv::Mat &ori_img, std::vector<uint8_t> &chw_vec);
/*************************for ai2d ori_img process********************/
// resize
/**
* @brief resize函数,对chw数据进行resize
* @param ori_shape 原始数据chw
* @param chw_vec 原始数据
* @param ai2d_out_tensor ai2d输出
* @return None
*/
static void resize(FrameCHWSize ori_shape, std::vector<uint8_t> &chw_vec, runtime_tensor &ai2d_out_tensor);
/**
* @brief resize函数
* @param builder ai2d构建器,用于运行ai2d
* @param ai2d_in_tensor ai2d输入
* @param ai2d_out_tensor ai2d输出
* @return None
*/
static void resize(std::unique_ptr<ai2d_builder> &builder, runtime_tensor &ai2d_in_tensor, runtime_tensor &ai2d_out_tensor);
/**
* @brief 将分类任务的结果绘制到图像上
* @param frame 原始图像
* @param results 分类的结果
* @return None
*/
static void draw_cls_res(cv::Mat& frame, vector<cls_res>& results);
/**
* @brief 将分类任务的结果绘制到屏幕的osd中
* @param frame 原始图像
* @param results 分类的结果
* @param osd_frame_size osd的宽高
* @param sensor_frame_size sensor的宽高
* @return None
*/
static void draw_cls_res(cv::Mat& frame, vector<cls_res>& results, FrameSize osd_frame_size, FrameSize sensor_frame_size);
};
#endif
如果您有需要还可以添加其他的工具函数。下面是utils.cc文件,完成工具类接口的实现:
#include <iostream>
#include "utils.h"
using std::ofstream;
using std::vector;
auto cache = cv::Mat::zeros(1, 1, CV_32FC1);
cv::Mat Utils::resize(const cv::Mat img, const FrameSize &frame_size)
{
cv::Mat cropped_img;
cv::resize(img, cropped_img, cv::Size(frame_size.width, frame_size.height), cv::INTER_LINEAR);
return cropped_img;
}
void Utils::bgr2rgb_and_hwc2chw(cv::Mat &ori_img, std::vector<uint8_t> &chw_vec)
{
// for bgr format
std::vector<cv::Mat> bgrChannels(3);
cv::split(ori_img, bgrChannels);
for (auto i = 2; i > -1; i--)
{
std::vector<uint8_t> data = std::vector<uint8_t>(bgrChannels[i].reshape(1, 1));
chw_vec.insert(chw_vec.end(), data.begin(), data.end());
}
}
void Utils::resize(FrameCHWSize ori_shape, std::vector<uint8_t> &chw_vec, runtime_tensor &ai2d_out_tensor)
{
// build ai2d_in_tensor
dims_t in_shape{1, ori_shape.channel, ori_shape.height, ori_shape.width};
runtime_tensor ai2d_in_tensor = host_runtime_tensor::create(typecode_t::dt_uint8, in_shape, hrt::pool_shared).expect("cannot create input tensor");
auto input_buf = ai2d_in_tensor.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
memcpy(reinterpret_cast<char *>(input_buf.data()), chw_vec.data(), chw_vec.size());
hrt::sync(ai2d_in_tensor, sync_op_t::sync_write_back, true).expect("write back input failed");
// run ai2d
// ai2d_datatype_t ai2d_dtype{ai2d_format::NCHW_FMT, ai2d_format::NCHW_FMT, typecode_t::dt_uint8, typecode_t::dt_uint8};
ai2d_datatype_t ai2d_dtype{ai2d_format::NCHW_FMT, ai2d_format::NCHW_FMT, ai2d_in_tensor.datatype(), ai2d_out_tensor.datatype()};
ai2d_crop_param_t crop_param { false, 30, 20, 400, 600 };
ai2d_shift_param_t shift_param{false, 0};
ai2d_pad_param_t pad_param{false, {{0, 0}, {0, 0}, {0, 0}, {0, 0}}, ai2d_pad_mode::constant, {114, 114, 114}};
ai2d_resize_param_t resize_param{true, ai2d_interp_method::tf_bilinear, ai2d_interp_mode::half_pixel};
ai2d_affine_param_t affine_param{false, ai2d_interp_method::cv2_bilinear, 0, 0, 127, 1, {0.5, 0.1, 0.0, 0.1, 0.5, 0.0}};
dims_t out_shape = ai2d_out_tensor.shape();
ai2d_builder builder { in_shape, out_shape, ai2d_dtype, crop_param, shift_param, pad_param, resize_param, affine_param };
builder.build_schedule();
builder.invoke(ai2d_in_tensor,ai2d_out_tensor).expect("error occurred in ai2d running");
}
void Utils::resize(std::unique_ptr<ai2d_builder> &builder, runtime_tensor &ai2d_in_tensor, runtime_tensor &ai2d_out_tensor)
{
// run ai2d
ai2d_datatype_t ai2d_dtype{ai2d_format::NCHW_FMT, ai2d_format::NCHW_FMT, ai2d_in_tensor.datatype(), ai2d_out_tensor.datatype()};
ai2d_crop_param_t crop_param { false, 30, 20, 400, 600 };
ai2d_shift_param_t shift_param{false, 0};
ai2d_pad_param_t pad_param{false, {{0, 0}, {0, 0}, {0, 0}, {0, 0}}, ai2d_pad_mode::constant, {114, 114, 114}};
ai2d_resize_param_t resize_param{true, ai2d_interp_method::tf_bilinear, ai2d_interp_mode::half_pixel};
ai2d_affine_param_t affine_param{false, ai2d_interp_method::cv2_bilinear, 0, 0, 127, 1, {0.5, 0.1, 0.0, 0.1, 0.5, 0.0}};
dims_t in_shape = ai2d_in_tensor.shape();
dims_t out_shape = ai2d_out_tensor.shape();
builder.reset(new ai2d_builder(in_shape, out_shape, ai2d_dtype, crop_param, shift_param, pad_param, resize_param, affine_param));
builder->build_schedule();
builder->invoke(ai2d_in_tensor,ai2d_out_tensor).expect("error occurred in ai2d running");
}
void Utils::draw_cls_res(cv::Mat& frame, vector<cls_res>& results)
{
double fontsize = (frame.cols * frame.rows * 1.0) / (300 * 250);
if (fontsize > 2)
{
fontsize = 2;
}
for(int i = 0; i < results.size(); i++)
{
std::string text = "class: " + results[i].label + ", score: " + std::to_string(round(results[i].score * 100) / 100.0).substr(0, 4);
cv::putText(frame, text, cv::Point(1, 40), cv::FONT_HERSHEY_SIMPLEX, 0.8, cv::Scalar(255, 255, 0), 2);
std::cout << text << std::endl;
}
}
void Utils::draw_cls_res(cv::Mat& frame, vector<cls_res>& results, FrameSize osd_frame_size, FrameSize sensor_frame_size)
{
double fontsize = (frame.cols * frame.rows * 1.0) / (1100 * 1200);
for(int i = 0; i < results.size(); i++)
{
std::string text = "class: " + results[i].label + ", score: " + std::to_string(round(results[i].score * 100) / 100.0).substr(0, 4);
cv::putText(frame, text, cv::Point(1, 40), cv::FONT_HERSHEY_SIMPLEX, 0.8, cv::Scalar(255, 255, 255, 0), 2);
std::cout << text << std::endl;
}
}
为了便于调试,我们在scoped_timing.hpp中封装了计时类ScopedTiming,用于统计在该类实例生命周期内的耗时。
#include <chrono>
#include <string>
#include <iostream>
/**
* @brief 计时类
* 统计在该类实例生命周期内的耗时
*/
class ScopedTiming
{
public:
/**
* @brief ScopedTiming 构造函数,初始化计时对象名称并开始计时
* @param info 计时对象名称
* @param enable_profile 是否开始计时
* @return None
*/
ScopedTiming(std::string info = "ScopedTiming", int enable_profile = 1)
: m_info(info), enable_profile(enable_profile)
{
if (enable_profile)
{
m_start = std::chrono::steady_clock::now();
}
}
/**
* @brief ScopedTiming析构,结束计时,并打印耗时
* @return None
*/
~ScopedTiming()
{
if (enable_profile)
{
m_stop = std::chrono::steady_clock::now();
double elapsed_ms = std::chrono::duration<double, std::milli>(m_stop - m_start).count();
std::cout << m_info << " took " << elapsed_ms << " ms" << std::endl;
}
}
private:
int enable_profile; // 是否统计时间
std::string m_info; // 计时对象名称
std::chrono::steady_clock::time_point m_start; // 计时开始时间
std::chrono::steady_clock::time_point m_stop; // 计时结束时间
};
main.cc是实现板端推理的主要代码,主要实现解析传入参数,打印使用说明,实现两个不同分支的推理。如果输入的第二个参数是推理图像路径,则调用image_proc函数进行图像推理;如果传入的是None,则调用video_proc函数进行视频流推理。
静态图推理代码
void image_proc_cls(string &kmodel_path, string &image_path,vector<string> labels,float cls_thresh ,int debug_mode)
{
cv::Mat ori_img = cv::imread(image_path);
int ori_w = ori_img.cols;
int ori_h = ori_img.rows;
//创建任务类实例
Classification cls(kmodel_path,image_path,labels,cls_thresh,debug_mode);
//前处理
cls.pre_process(ori_img);
//推理
cls.inference();
vector<cls_res> results;
//后处理
cls.post_process(results);
Utils::draw_cls_res(ori_img,results);
cv::imwrite("result_cls.jpg", ori_img);
}
上述代码是main.cc中的静态图像推理代码部分,首先从图片路径初始化cv::Mat对象ori_img,然后初始化Classification实例cls,调用cls预处理函数pre_process,推理函数reference,后处理函数post_process,最后调用utils.h中的draw_cls_res将结果绘制在图片上并保存为result_cls.jpg。如您需要修改前后处理部分,可在Classification.cc中进行修改,如您想添加其他工具方法,可在utils中定义,并在utils.cc中实现。
视频流推理代码可以参考SDK编译章节的示例2部分代码。其中AI开发的核心代码为:
void video_proc_cls(string &kmodel_path, string &image_path,vector<string> labels,float cls_thresh , int debug_mode)
{
// 启动video capture
vivcap_start();
// 创建一帧数据对象
k_video_frame_info vf_info;
// osd
void *pic_vaddr = NULL;
memset(&vf_info, 0, sizeof(vf_info));
vf_info.v_frame.width = osd_width;
vf_info.v_frame.height = osd_height;
vf_info.v_frame.stride[0] = osd_width;
vf_info.v_frame.pixel_format = PIXEL_FORMAT_ARGB_8888;
block = vo_insert_frame(&vf_info, &pic_vaddr);
// alloc memory
size_t paddr = 0;
void *vaddr = nullptr;
size_t size = SENSOR_CHANNEL * SENSOR_HEIGHT * SENSOR_WIDTH;
int ret = kd_mpi_sys_mmz_alloc_cached(&paddr, &vaddr, "allocate", "anonymous", size);
if (ret)
{
std::cerr << "physical_memory_block::allocate failed: ret = " << ret << ", errno = " << strerror(errno) << std::endl;
std::abort();
}
// 初始化图像分类任务任务实例
Classification cls(kmodel_path,image_path,labels,cls_thresh, {SENSOR_CHANNEL, SENSOR_HEIGHT, SENSOR_WIDTH}, reinterpret_cast<uintptr_t>(vaddr), reinterpret_cast<uintptr_t>(paddr), debug_mode);
// 分类结果
vector<cls_res> results;
// 当没有停止时,对每一帧图像进行推理
while (!isp_stop)
{
ScopedTiming st("total time", debug_mode);
{
ScopedTiming st("read capture", debug_mode);
// VICAP_CHN_ID_1 out rgb888p
memset(&dump_info, 0 , sizeof(k_video_frame_info));
// dump一帧图像到dump_info
ret = kd_mpi_vicap_dump_frame(vicap_dev, VICAP_CHN_ID_1, VICAP_DUMP_YUV, &dump_info, 1000);
if (ret) {
printf("sample_vicap...kd_mpi_vicap_dump_frame failed.\n");
continue;
}
}
{
ScopedTiming st("isp copy", debug_mode);
auto vbvaddr = kd_mpi_sys_mmap_cached(dump_info.v_frame.phys_addr[0], size);
memcpy(vaddr, (void *)vbvaddr, SENSOR_HEIGHT * SENSOR_WIDTH * 3);
kd_mpi_sys_munmap(vbvaddr, size);
}
// results清空,准备保存推理结果
results.clear();
//预处理
cls.pre_process();
// 推理
cls.inference();
// 后处理
cls.post_process(results);
// 创建osd帧
cv::Mat osd_frame(osd_height, osd_width, CV_8UC4, cv::Scalar(0, 0, 0, 0));
//在osd上绘制结果
{
ScopedTiming st("osd draw", debug_mode);
Utils::draw_cls_res(osd_frame, results, {osd_width, osd_height}, {SENSOR_WIDTH, SENSOR_HEIGHT});
}
// 将绘制的osd帧插入输出显示通道
{
ScopedTiming st("osd copy", debug_mode);
memcpy(pic_vaddr, osd_frame.data, osd_width * osd_height * 4);
//显示通道插入帧
kd_mpi_vo_chn_insert_frame(osd_id+3, &vf_info); //K_VO_OSD0
printf("kd_mpi_vo_chn_insert_frame success \n");
ret = kd_mpi_vicap_dump_release(vicap_dev, VICAP_CHN_ID_1, &dump_info);
if (ret) {
printf("sample_vicap...kd_mpi_vicap_dump_release failed.\n");
}
}
}
// 终止
vo_osd_release_block();
vivcap_stop();
// free memory
ret = kd_mpi_sys_mmz_free(paddr, vaddr);
if (ret)
{
std::cerr << "free failed: ret = " << ret << ", errno = " << strerror(errno) << std::endl;
std::abort();
}
}
为了使用方便,我们对视频流处理部分做了封装,您可以参考示例代码:K230_training_scripts/end2end_cls_doc at main · kendryte/K230_training_scripts (github.com)中k230_code中的vi_vo.h文件和main.cc中的具体实现。
k230_code/k230_deploy/CMakeLists.txt说明
这是k230_code/k230_deploy目录下的CMakeLists.txt脚本,设置编译的C++文件和生成的elf可执行文件名称,由下面:
set(src main.cc utils.cc ai_base.cc classification.cc)
set(bin main.elf)
#添加项目的根目录到头文件搜索路径中。
include_directories(${PROJECT_SOURCE_DIR})
#添加 nncase RISC-V 向量库的头文件目录
include_directories(${nncase_sdk_root}/riscv64/rvvlib/include)
#添加 k230 SDK 中的用户应用程序 API 头文件目录
include_directories(${k230_sdk}/src/big/mpp/userapps/api/)
#添加 k230 SDK 的mpp(Media Process Platform)头文件目录
include_directories(${k230_sdk}/src/big/mpp/include)
# 添加与mpp相关的头文件目录
include_directories(${k230_sdk}/src/big/mpp/include/comm)
#添加示例 VO(视频输出)应用程序头文件目录
include_directories(${k230_sdk}/src/big/mpp/userapps/sample/sample_vo)
#添加链接器搜索路径,指向 nncase RISC-V 向量库的目录
link_directories(${nncase_sdk_root}/riscv64/rvvlib/)
#创建一个可执行文件,将之前设置的源文件列表作为输入
add_executable(${bin} ${src})
#设置可执行文件需要链接的库。列表中列出了各种库,包括 nncase 相关的库、k230 SDK 的库,以及其他一些库
target_link_libraries(${bin} ...)
#将一些 OpenCV相关的库和其他一些第三方库链接到可执行文件中
target_link_libraries(${bin} opencv_imgproc opencv_imgcodecs opencv_core zlib libjpeg-turbo libopenjp2 libpng libtiff libwebp csi_cv)
# 安装生成的可执行文件到指定的目标路径(bin 目录)中
install(TARGETS ${bin} DESTINATION bin)
k230_code/CMakeLists.txt说明
cmake_minimum_required(VERSION 3.2)
project(nncase_sdk C CXX)
# 设置nncase的根目录,在src/big/nncase目录下,您也可设置为绝对路径
set(nncase_sdk_root "${PROJECT_SOURCE_DIR}/../../nncase/")
# 设置k230_sdk的根目录,当前是从nncase目录的三级父目录得到,您也可设置为绝对路径
set(k230_sdk ${nncase_sdk_root}/../../../)
#设置链接脚本路径,链接脚本放于k230_code/cmake下
set(CMAKE_EXE_LINKER_FLAGS "-T ${PROJECT_SOURCE_DIR}/cmake/link.lds --static")
# set opencv
set(k230_opencv ${k230_sdk}/src/big/utils/lib/opencv)
include_directories(${k230_opencv}/include/opencv4/)
link_directories(${k230_opencv}/lib ${k230_opencv}/lib/opencv4/3rdparty)
# set mmz
link_directories(${k230_sdk}/src/big/mpp/userapps/lib)
# set nncase
include_directories(${nncase_sdk_root}/riscv64)
include_directories(${nncase_sdk_root}/riscv64/nncase/include)
include_directories(${nncase_sdk_root}/riscv64/nncase/include/nncase/runtime)
link_directories(${nncase_sdk_root}/riscv64/nncase/lib/)
# 添加待编译子项目
add_subdirectory(k230_deploy)
k230_code/build_app.sh说明
#!/bin/bash
set -x
# set cross build toolchain
# 将交叉编译工具链的路径添加到系统的 PATH 环境变量中,以便在后续的命令中使用。该工具链是使用的大核编译工具链。
export PATH=$PATH:/opt/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/
clear
rm -rf out
mkdir out
pushd out
cmake -DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=`pwd` \
-DCMAKE_TOOLCHAIN_FILE=cmake/Riscv64.cmake \
..
make -j && make install
popd
# 生成的main.elf可以在k230_code目录下的k230_bin文件夹下找到
k230_bin=`pwd`/k230_bin
rm -rf ${k230_bin}
mkdir -p ${k230_bin}
if [ -f out/bin/main.elf ]; then
cp out/bin/main.elf ${k230_bin}
fi
10.1.5.3 代码编译#
将项目中的k230_code文件夹拷贝到k230_sdk目录下的src/big/nncase下,执行编译脚本,将C++代码编译成main.elf可执行文件。
# 如果烧录的是Linux+RT-Smart双系统镜像,在k230_SDK根目录下执行
make CONF=k230_canmv_defconfig prepare_memory
# 如果烧录的是纯RT-Smart单系统镜像,在k230_SDK根目录下执行
make CONF=k230_canmv_only_rtt_defconfig prepare_memory
# 回到当前项目目录,赋予权限
chmod +x build_app.sh
./build_app.sh
10.1.5.4 准备ELF文件#
后面部署步骤需要用到的文件包括:
k230_code/k230_bin/main.elf;
10.1.6 网络配置与文件拷贝#
将待使用文件拷贝到开发板上有三种方式可供选择。
10.1.6.1 离线文件拷贝#
注: 该方法适用于Linux+RT-Smart双系统镜像和纯RT-Smart单系统镜像;
通过插拔SD卡,将所需文件拷贝到相应位置,对于Linux+RT-Smart双系统,SD卡根目录映射到大小核的/sharefs目录下;对于纯RT-Smart单系统,SD卡根目录映射到大核的/sdcard目录下;
10.1.6.2 tftp文件传输#
注:该方法只适用于Linux+RT-Smart双系统镜像;纯RT-Smart单系统请选择离线拷贝方法;
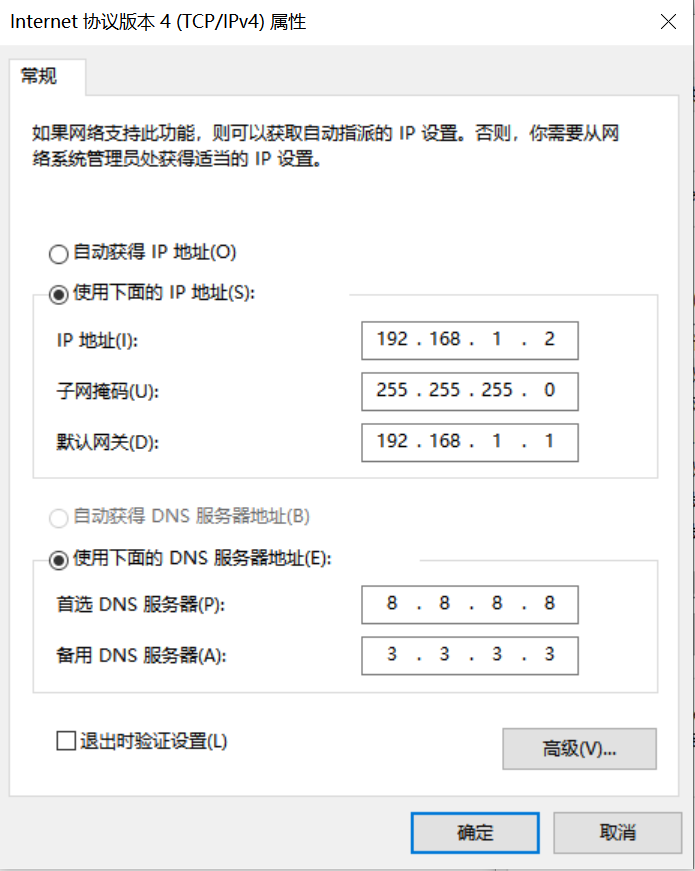
Windows系统PC端网络配置
控制面板->网络和共享中心->更改适配器设置->以太网网卡->右键属性->选中(TCP/IPv4)->属性
配置IP地址、掩码、网关,配置DNS服务器地址:
开发板网络配置
进入小核命令行,执行:
# 查看是否有eth0
ifconfig
# 配置开发板IP,和PC在同一网段下
ifconfig eth0 192.168.1.22
# 查看IP配置
ifconfig
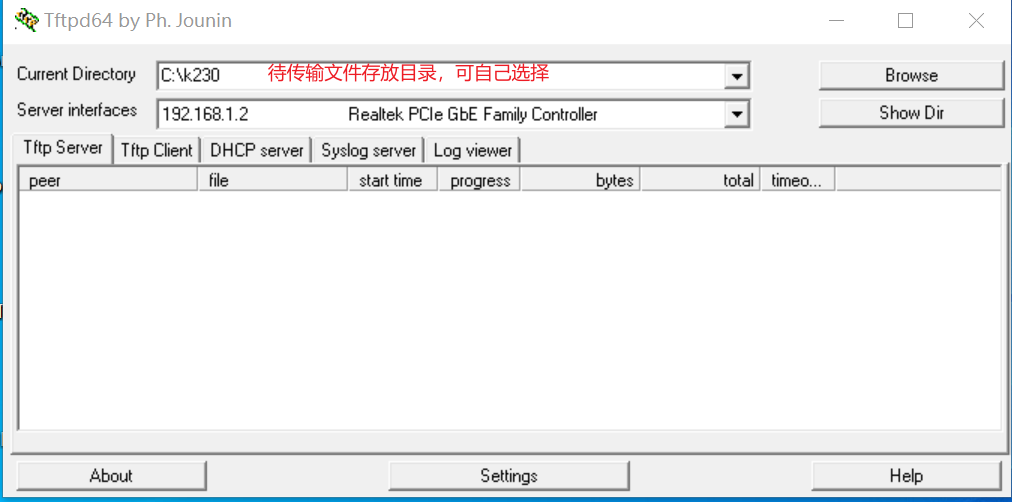
工具:tftpd64
安装tftp通信工具,下载地址:https://bitbucket.org/phjounin/tftpd64/downloads/
启动tftpd64,配置待传输文件存放目录和服务网卡
sharefs说明
# 进入小核根目录
cd /
# 查看目录
ls
# sharefs目录是大小核共用目录,因此从小核拷贝到sharefs目录下的文件对大核也可见
文件传输
# 以下代码在小核串口执行
# 将PC上tftpd64配置文件存放目录中的文件传输至开发板的当前目录
tftp -g -r your_file 192.168.1.2
# 将开发板当前目录下的文件传输至tftpd64配置文件存放目录
tftp -p -r board_file 192.168.1.2
10.1.6.2 scp文件传输#
注:该方法只适用于Linux+RT-Smart双系统镜像;纯RT-Smart单系统请选择离线拷贝方法;
在Linux系统中,PC正常连接网络,开发板可以通过网线连接PC所在网关下其他网口,通过scp命令实现文件传输。
开发板上电,进入大小核COM界面,在小核执行scp传输命令:
# 从PC拷贝文件至开发板
scp 用户名@域名或IP:文件所在目录 开发板目的目录
#拷贝文件夹
scp -r 用户名@域名或IP:文件所在目录 开发板目的目录
# 从开发板拷贝文件至PC
scp 开发板待拷贝目录 用户名@域名或IP:PC目的目录
# 拷贝文件夹
scp -r 开发板待拷贝目录 用户名@域名或IP:PC目的目录
10.1.7 K230端部署#
10.1.7.1 板端部署过程#
按照上节提供的文件拷贝过程,将模型训练和测试部分准备好的文件和C++代码编译部分准备好的elf文件拷贝到开发板。Linux+RT-Smart双系统在/sharefs下,纯RT-Smart在/sdcard下,创建文件夹test_cls:
test_cls
├──best.kmodel
├──labels.txt
├──main.elf
├──test.jpg
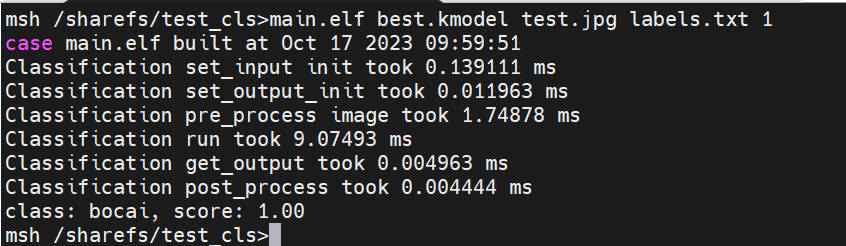
执行静态图推理,执行下述代码(注意:代码需在大核下执行):
# Linux+RT-Smart双系统
cd /sharefs/test_cls
# 纯RT-Smart单系统
cd /sdcard/test_cls
# "模型推理时传参说明:"
# "<kmodel_path> <image_path> <labels_txt> <debug_mode>"
# "Options:"
# " kmodel_path Kmodel的路径\n"
# " image_path 待推理图片路径/摄像头(None)\n"
# " labels_txt 类别标签文件路径\n"
# " debug_mode 是否需要调试,0、1、2分别表示不调试、简单调试、详细调试\n"
main.elf best.kmodel test.jpg labels.txt 2
如执行摄像头视频流推理,执行下述代码:
main.elf best.kmodel None labels.txt 2
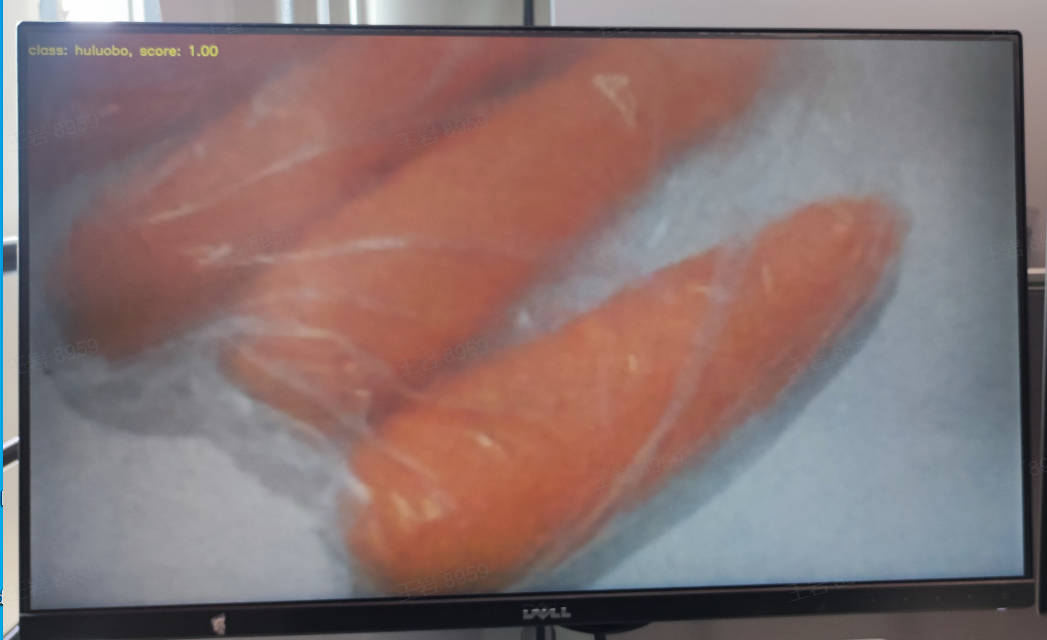
10.1.7.2 上板部署效果#
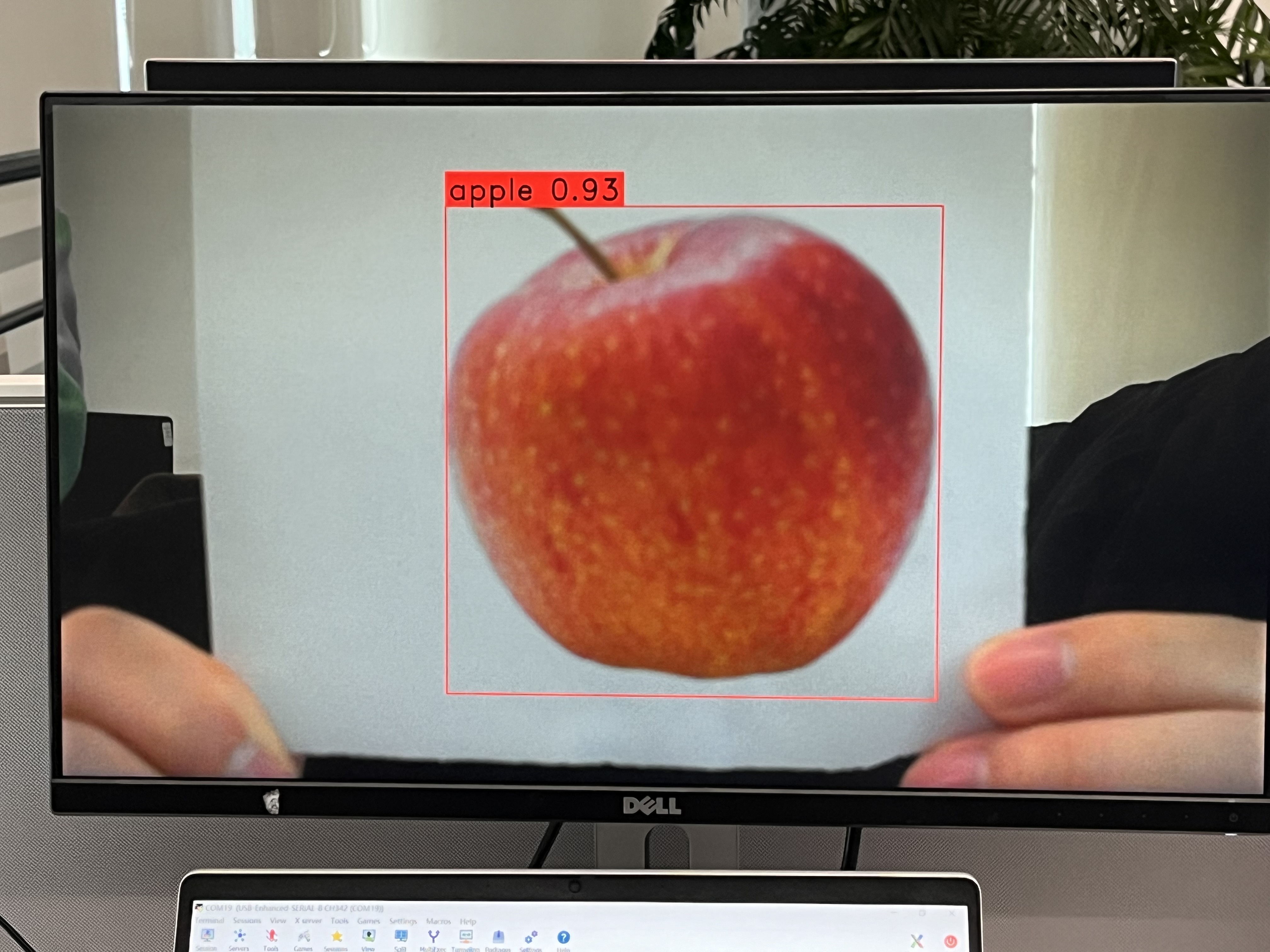
静态图推理图示:
视频流推理图示:
10.2 使用KTS实现目标检测任务#
10.2.1 环境搭建#
(1)Linux系统;
(2)安装显卡驱动;
(3)安装Anaconda,用于创建模型训练环境;
(4)安装Docker,用于创建SDK镜像编译环境;
(5)安装dotnet SDK;
10.2.2 数据准备#
目标检测任务自定义数据集按照如下格式组织,根目录下包括:以类别名称命名的子目录,子目录中是其类别的所有图像样本。
10.2.3 模型训练和测试#
本节内容在训练环境中实现。
10.2.3.1 创建虚拟环境#
开启命令终端:
conda create -n myenv python=3.9
conda activate myenv
10.2.3.2 安装python依赖库#
按照项目内的requriements.txt安装训练所用的python库,等待安装:
pip install -r requriements.txt
在requriments.txt中会安装模型转换的包nncase和nncase-kpu,nncase 是一个为 AI 加速器设计的神经网络编译器。
编译镜像和使用nncase转换kmodel时请注意版本对应关系,k230_sdk版本和nncase版本对应关系参考下述链接:
K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)
您可以按照对应版本更换nncase和nncase-kpu的版本,比如更换nncase版本为2.7.0:
pip install nncase==2.7.0
pip install nncase-kpu==2.7.0
10.2.3.3 配置训练参数#
给出的训练脚本中配置文件yaml/config.yaml设置如下:
dataset:
root_folder: ../data/fruit # 目标检测数据集路径
origion_json: labels.json # 目标检测数据集标注json文件
split: true # 是否重新执行拆分,第一次执行必须为true
val_ratio: 0.1 # 验证集比例
test_ratio: 0.1 # 测试集比例
train_val_test:
json_dir: ../gen # 拆分过程生成的训练集、验证集、测试集json文件,标签名称文件、校正集文件
model_save_dir: ../checkpoints # 模型保存路径
gpu_index: 0 # 调用的gpu索引,如果gpu不可用,会使用cpu
img_size: 640 # 分辨率
learningrate: 0.001 #学习率
mean: [ 0.485, 0.456, 0.406 ] # 图像标准化均值
std: [ 0.229, 0.224, 0.225 ] # 图像标准化标准差
epochs: 300 # 训练迭代次数
nms_option: false #类内或者类间做nms false代表类内
pre_train_dir: pre_pth # 预训练模型存放路径
train_batch_size: 32 # 训练迭代batch
val_batch_size: 8 # 验证迭代batch
test_batch_size: 8 # 测试迭代batch
inference:
mode: image # 推理模式,分为image和video; image模式下可推理单张图片和目录下所有图片,video调用摄像头实现推理
inference_model: best # 分为best和last,分别调用checkpoints下的best.pth和last.pth进行推理
image_path: ../data/fruit/test.jpg # 如果该路径为图片路径,则进行单张图片推理;如果该路径为目录,则对目录下所有图片进行推理
deploy_json: deploy.json # 后续kmodel需要读取的参数文件
confidence_threshold: 0.55 # 检测框阈值
nms_threshold: 0.2 # 最大值抑制阈值
deploy:
onnx_img_size: [640,640] # 转onnx输入分辨率 [w , h] 必须是32的倍数
chip: k230 # 芯片类型,分为“k230”和“cpu”两种
ptq_option: 0 # 量化类型,0为uint8,1,2,3,4为uint16的不同形式
10.2.3.4 模型训练#
进入到工程的scripts目录,执行训练代码:
python3 main.py
如果训练成功,在配置文件的model_save_dir目录下可以找到训练好的last.pth、best.pth、best.onnx、best.kmodel。
10.2.3.5 模型测试#
设置配置文件中的inference部分,设置测试配置,执行测试代码:
python3 inference.py
10.2.3.6 准备文件#
后面部署步骤需要用到的文件包括:
(1)checkpoints/best.kmodel;
(2)gen/deploy.json
(3)待测试图片test.jpg;
10.2.4 K230_SDK镜像编译和烧录#
编译镜像和使用nncase转换kmodel时请注意版本对应关系,k230_sdk版本和nncase版本对应关系参考下述链接:
K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)
如果您选择使用嘉楠开发者社区 (canaan-creative.com)资料下载->K230->Images部分提供的镜像,请您注意版本对应关系下载烧录。
10.2.4.1 Docker环境搭建#
# 下载docker编译镜像
docker pull ghcr.io/kendryte/k230_sdk
# 可以使用以下命令确认docker镜像是否拉取成功
docker images | grep ghcr.io/kendryte/k230_sdk
# 下载sdk源码
git clone https://github.com/kendryte/k230_sdk.git
cd k230_sdk
# 下载工具链Linux和RT-Smart toolchain, buildroot package, AI package等
make prepare_sourcecode
# 创建docker容器,$(pwd):$(pwd)表示系统当前目录映射到docker容器内部的相同目录下,将系统下的工具链目录映射到docker容器内部的/opt/toolchain目录下
docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) ghcr.io/kendryte/k230_sdk /bin/bash
10.2.4.2 镜像编译#
请在k230_sdk根目录下按照不同的系统需求执行下述命令:
# (1)如果选择自行编译Linux+RT-Smart双系统镜像,执行下述命令
make CONF=k230_canmv_defconfig
# (2)如果选择使用开发者社区下载的Linux+RT-Smart双系统镜像,请务必在k230_sdk根目录下执行如下命令以指定开发板类型
make mpp
make CONF=k230_canmv_defconfig prepare_memory
# (3)如果选择自行编译纯RT-Smart系统镜像,执行下述命令,开发者社区暂未开放纯RT-Smart镜像下载
make CONF=k230_canmv_only_rtt_defconfig
编译产物如下:
请您耐心等待镜像编译成功,
make mpp过程相比完整镜像编译过程耗时较少。对于Linux+RT-Smart双系统编译,在k230_sdk根目录/output/k230_canmv_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_defconfig/images ├── big-core ├── little-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
对于RT-Smart单系统编译,在k230_sdk根目录/output/k230_canmv_only_rtt_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_only_rtt_defconfig/images ├── big-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
10.2.4.3 镜像烧录#
CANMV K230 支持SDCard启动方式。为方便开发,建议您准备一张TF卡(Micro SD卡)。
Linux:
在SD卡插到宿主机之前,输入:
ls -l /dev/sd\*
查看当前的存储设备。
将TF卡插入宿主机后,再次输入:
ls -l /dev/sd\*
查看此时的存储设备,新增加的就是TF卡设备节点。
假设/dev/sdc就是TF卡设备节点,执行如下命令烧录TF卡:
sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync
Windows:
Windows下可通过rufus工具对TF卡进行烧录,rufus工具下载地址。
1)将SD卡插入PC,然后启动rufus工具,点击工具界面的”选择”按钮,选择待烧写的固件。
2)点击“开始”按钮开始烧写,烧写过程有进度条展示,烧写结束后会提示“准备就绪”。
10.2.4.4 上电启动开发板#
安装MobaXterm实现串口通信,MobaXterm下载地址:https://mobaxterm.mobatek.net。
将烧录完成的SD卡插入进开板板卡槽中,HDMI输出连显示器,百兆网口连以太网,POWER连串口并供电。
对于Linux+RT-Smart双系统镜像,系统上电后,默认会有两个串口设备,可分别用于访问小核Linux和大核RT-Smart,小核Linux默认用户名root,密码为空。大核RT-Smart系统中开机会自动启动一个应用程序,可按q键退出至命令提示符终端。
对于纯RT-Smart单系统镜像,系统上电后,大核RT-Smart系统中开机会自动启动一个应用程序,可按q键退出至命令提示符终端。
10.2.5 C++代码编译#
10.2.5.1 代码结构#
完成上述开发板的准备工作后,我们可以使用C++编写自己的代码,下面就目标检测任务的示例代码进行解析。本教程给出相关目标检测任务的示例代码,并进行解析。示例代码参考:kendryte/K230_training_scripts
k230_code
├──cmake
├──link.lds #链接脚本
├──Riscv64.cmake
├──k230_deploy
├──ai_base.cc # 模型部署基类实现
├──ai_base.h # 模型部署基类,封装了nncase加载、input设置、模型推理、获取output操作,后续具体任务开发只需关注模型的前处理、后处理即可
├──anchorbase_det.cc # 目标检测code类实现
├──anchorbase_det.h # 目标检测类定义,继承AIBase,用于加载kmodel实现目标检测任务,封装模型推理的前后处理
├──main.cc # 主函数,参数解析,初始化AnchorBaseDet类示例,实现上板功能
├──scoped_timing.hpp # 时间测试工具
├──utils.cc # 工具类实现
├──utils.h # 工具类, 封装了图像预处理和目标检测任务的常用函数,包括读取二进制文件、保存图片、图像处理、结果绘制等,用户可根据自己需求丰富该文件
├──vi_vo.h # 视频输入输出头文件
├──json.h # json文件解析头文件
├──json.cpp # json文件解析接口实现
├──CMakeLists.txt # CMake脚本用于构建一个使用C/C++源文件的可执行文件,并链接到各种库
├──build_app.sh # 编译脚本,使用交叉编译工具链编译k230_deploy工程
├──CMakeLists.txt # CMake脚本用于构建 nncase_sdk 的项目工程
10.2.5.2 核心代码#
当您得到kmodel模型之后,具体AI上板代码包括:sensor&display初始化、kmodel加载、模型输入输出设置、获取图像、输入数据加载、输入数据预处理、模型推理、模型输出获取、输出后处理、OSD显示等步骤。如图所示:
图中黄框部分在vi_vo.h中给出了给出了接口,下面针对红框部分,介绍如何实现AI应用开发。
在上述过程中,kmodel加载、模型输入设置、模型推理、模型输出获取是所有任务的共有步骤。我们对此做了封装,ai_base.h和ai_base.cc可以直接拷贝使用。
ai_base.h定义了AIBase基类以及共有操作的接口:
#ifndef AI_BASE_H
#define AI_BASE_H
#include <vector>
#include <string>
#include <fstream>
#include <nncase/runtime/interpreter.h>
#include "scoped_timing.hpp"
using std::string;
using std::vector;
using namespace nncase::runtime;
/**
* @brief AI基类,封装nncase相关操作
* 主要封装了nncase的加载、设置输入、运行、获取输出操作,后续开发demo只需要关注模型的前处理、后处理即可
*/
class AIBase
{
public:
/**
* @brief AI基类构造函数,加载kmodel,并初始化kmodel输入、输出
* @param kmodel_file kmodel文件路径
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)None
* @return None
*/
AIBase(const char *kmodel_file,const string model_name, const int debug_mode = 1);
/**
* @brief AI基类析构函数
* @return None
*/
~AIBase();
/**
* @brief 设置kmodel输入
* @param buf 输入数据指针
* @param size 输入数据大小
* @return None
*/
void set_input(const unsigned char *buf, size_t size);
/**
* @brief 根据索引获取kmodel输入tensor
* @param idx 输入数据索引
* @return None
*/
runtime_tensor get_input_tensor(size_t idx);
/**
* @brief 设置模型的输入tensor
* @param idx 输入数据索引
* @param tensor 输入tensor
*/
void set_input_tensor(size_t idx, runtime_tensor &tensor);
/**
* @brief 初始化kmodel输出
* @return None
*/
void set_output();
/**
* @brief 推理kmodel
* @return None
*/
void run();
/**
* @brief 获取kmodel输出,结果保存在对应的类属性中
* @return None
*/
void get_output();
protected:
string model_name_; // 模型名字
int debug_mode_; // 调试模型,0(不打印),1(打印时间),2(打印所有)
vector<float *> p_outputs_; // kmodel输出对应的指针列表
vector<vector<int>> input_shapes_; //{{N,C,H,W},{N,C,H,W}...}
vector<vector<int>> output_shapes_; //{{N,C,H,W},{N,C,H,W}...}} 或 {{N,C},{N,C}...}}等
vector<int> each_input_size_by_byte_; //{0,layer1_length,layer1_length+layer2_length,...}
vector<int> each_output_size_by_byte_; //{0,layer1_length,layer1_length+layer2_length,...}
private:
/**
* @brief 首次初始化kmodel输入,并获取输入shape
* @return None
*/
void set_input_init();
/**
* @brief 首次初始化kmodel输出,并获取输出shape
* @return None
*/
void set_output_init();
vector<unsigned char> kmodel_vec_; // 通过读取kmodel文件得到整个kmodel数据,用于传给kmodel解释器加载kmodel
interpreter kmodel_interp_; // kmodel解释器,从kmodel文件构建,负责模型的加载、输入输出设置和推理
};
#endif
ai_base.cc是ai_base.h中定义所有接口的具体实现。
/*
ai_base.h中AIBase类定义接口的具体实现
*/
#include "ai_base.h"
#include <iostream>
#include <cassert>
#include "utils.h"
using std::cout;
using std::endl;
using namespace nncase;
using namespace nncase::runtime::detail;
/*AIBase构造函数*/
AIBase::AIBase(const char *kmodel_file,const string model_name, const int debug_mode) : debug_mode_(debug_mode),model_name_(model_name)
{
if (debug_mode > 1)
cout << "kmodel_file:" << kmodel_file << endl;
std::ifstream ifs(kmodel_file, std::ios::binary);//读入kmodel
kmodel_interp_.load_model(ifs).expect("Invalid kmodel");//kmodel解释器加载kmodel
set_input_init();
set_output_init();
}
/*析构函数*/
AIBase::~AIBase()
{
}
/*
首次初始化kmodel输入
*/
void AIBase::set_input_init()
{
ScopedTiming st(model_name_ + " set_input init", debug_mode_);//计时
int input_total_size = 0;
each_input_size_by_byte_.push_back(0); // 先补0,为之后做准备
for (int i = 0; i < kmodel_interp_.inputs_size(); ++i)
{
auto desc = kmodel_interp_.input_desc(i);//索引为i的输入描述
auto shape = kmodel_interp_.input_shape(i);//索引为i的输入shape
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");//创建输入tensor
kmodel_interp_.input_tensor(i, tensor).expect("cannot set input tensor");//绑定tensor到模型输入
vector<int> in_shape = {shape[0], shape[1], shape[2], shape[3]};
input_shapes_.push_back(in_shape);//存储输入shape
int dsize = shape[0] * shape[1] * shape[2] * shape[3];//输入总字节数
if (debug_mode_ > 1)
cout << "input shape:" << shape[0] << " " << shape[1] << " " << shape[2] << " " << shape[3] << endl;
if (desc.datatype == 0x06)//输入数据为uint8类型
{
input_total_size += dsize;
each_input_size_by_byte_.push_back(input_total_size);
}
else if (desc.datatype == 0x0B)//输入数据为float32类型
{
input_total_size += (dsize * 4);
each_input_size_by_byte_.push_back(input_total_size);
}
else
assert(("kmodel input data type supports only uint8, float32", 0));
}
each_input_size_by_byte_.push_back(input_total_size); // 最后一个保存总大小
}
/*
设置模型的输入数据,加载模型输入的具体数据
*/
void AIBase::set_input(const unsigned char *buf, size_t size)
{
//检查输入数据大小是否和模型要求大小相匹配
if (*each_input_size_by_byte_.rbegin() != size)
cout << "set_input:the actual input size{" + std::to_string(size) + "} is different from the model's required input size{" + std::to_string(*each_input_size_by_byte_.rbegin()) + "}" << endl;
assert((*each_input_size_by_byte_.rbegin() == size));
//计时
ScopedTiming st(model_name_ + " set_input", debug_mode_);
//循环遍历模型输入
for (size_t i = 0; i < kmodel_interp_.inputs_size(); ++i)
{
//获取模型的输入描述和形状
auto desc = kmodel_interp_.input_desc(i);
auto shape = kmodel_interp_.input_shape(i);
//创建tensor
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");
//将输入tensor映射到可写区域
auto mapped_buf = std::move(hrt::map(tensor, map_access_::map_write).unwrap()); // mapped_buf实际是有缓存数据的
//拷贝数据到tensor的缓冲区
memcpy(reinterpret_cast<void *>(mapped_buf.buffer().data()), buf, each_input_size_by_byte_[i + 1] - each_input_size_by_byte_[i]);
//解除映射
auto ret = mapped_buf.unmap();
ret = hrt::sync(tensor, sync_op_t::sync_write_back, true);
if (!ret.is_ok())
{
std::cerr << "hrt::sync failed" << std::endl;
std::abort();
}
//将tensor和模型的输入绑定
kmodel_interp_.input_tensor(i, tensor).expect("cannot set input tensor");
}
}
/*
按照索引获取模型的输入tensor
*/
runtime_tensor AIBase::get_input_tensor(size_t idx)
{
return kmodel_interp_.input_tensor(idx).expect("cannot get input tensor");
}
/*
按照索引设置模型的输入tensor
*/
void AIBase::set_input_tensor(size_t idx, runtime_tensor &tensor)
{
ScopedTiming st(model_name_ + " set_input_tensor", debug_mode_);
kmodel_interp_.input_tensor(idx, tensor).expect("cannot set input tensor");
}
/*
首次初始化kmodel输出
*/
void AIBase::set_output_init()
{
//计时
ScopedTiming st(model_name_ + " set_output_init", debug_mode_);
each_output_size_by_byte_.clear();
int output_total_size = 0;
each_output_size_by_byte_.push_back(0);
//循环遍历模型的输出
for (size_t i = 0; i < kmodel_interp_.outputs_size(); i++)
{
//获取输出描述和形状
auto desc = kmodel_interp_.output_desc(i);
auto shape = kmodel_interp_.output_shape(i);
vector<int> out_shape;
int dsize = 1;
for (int j = 0; j < shape.size(); ++j)
{
out_shape.push_back(shape[j]);
dsize *= shape[j];
if (debug_mode_ > 1)
cout << shape[j] << ",";
}
if (debug_mode_ > 1)
cout << endl;
output_shapes_.push_back(out_shape);
//获取数据的总大小
if (desc.datatype == 0x0B)
{
output_total_size += (dsize * 4);
each_output_size_by_byte_.push_back(output_total_size);
}
else
assert(("kmodel output data type supports only float32", 0));
//创建tensor
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
//将tensor和模型的输出绑定
kmodel_interp_.output_tensor(i, tensor).expect("cannot set output tensor");
}
}
/*
设置kmodel模型的输出
*/
void AIBase::set_output()
{
ScopedTiming st(model_name_ + " set_output", debug_mode_);
//循环将输出tensor和模型的输出绑定
for (size_t i = 0; i < kmodel_interp_.outputs_size(); i++)
{
auto desc = kmodel_interp_.output_desc(i);
auto shape = kmodel_interp_.output_shape(i);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
kmodel_interp_.output_tensor(i, tensor).expect("cannot set output tensor");
}
}
/*
调用kmodel_interp_.run()实现模型推理
*/
void AIBase::run()
{
ScopedTiming st(model_name_ + " run", debug_mode_);
kmodel_interp_.run().expect("error occurred in running model");
}
/*
获取模型的输出(float指针形式,后处理时由后处理的具体要求取出),为后续后处理做准备
*/
void AIBase::get_output()
{
ScopedTiming st(model_name_ + " get_output", debug_mode_);
//p_outputs_存储模型的输出的指针,可以有多个输出
p_outputs_.clear();
for (int i = 0; i < kmodel_interp_.outputs_size(); i++)
{
//获取输出tensor
auto out = kmodel_interp_.output_tensor(i).expect("cannot get output tensor");
//将输出tensor映射到主机内存
auto buf = out.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
//将映射后的数据转换为float指针
float *p_out = reinterpret_cast<float *>(buf.data());
p_outputs_.push_back(p_out);
}
}
不同任务场景的前处理和后处理有所不同,比如分类使用softmax计算类别概率,目标检测要做nms;因此您可以定义您的任务场景类继承AIBase类,将针对该任务的前处理和后处理代码进行封装。
anchorbase_det.h定义了和目标检测任务相关的模型前处理、后处理接口,在anchorbase_det.cc中实现了接口。
#ifndef _ANCHORBASE_DET_H
#define _ANCHORBASE_DET_H
#include "utils.h"
#include "ai_base.h"
#define STRIDE_NUM 3
/**
* @brief 多目标检测
* 主要封装了对于每一帧图片,从预处理、运行到后处理给出结果的过程
*/
class AnchorBaseDet : public AIBase
{
public:
/**
* @brief AnchorBaseDet构造函数,加载kmodel,并初始化kmodel输入、输出和多目标检测阈值
* @param args 构建对象需要的参数,config.json文件(包含检测阈值等)
* @param kmodel_file kmodel路径
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)
* @return None
*/
AnchorBaseDet(config_args args, const char *kmodel_file, const int debug_mode = 1);
/**
* @brief AnchorBaseDet构造函数,加载kmodel,并初始化kmodel输入、输出和多目标检测阈值
* @param args 构建对象需要的参数,config.json文件(包含检测阈值,kmodel路径等)
* @param kmodel_file kmodel路径
* @param isp_shape isp输入大小(chw)
* @param vaddr isp对应虚拟地址
* @param paddr isp对应物理地址
* @param debug_mode 0(不调试)、 1(只显示时间)、2(显示所有打印信息)
* @return None
*/
AnchorBaseDet(config_args args, const char *kmodel_file, FrameCHWSize isp_shape, uintptr_t vaddr, uintptr_t paddr,const int debug_mode);
/**
* @brief AnchorBaseDet析构函数
* @return None
*/
~AnchorBaseDet();
/**
* @brief 图片预处理
* @param ori_img 原始图片
* @return None
*/
void pre_process(cv::Mat ori_img);
/**
* @brief 视频流预处理(ai2d for isp)
* @return None
*/
void pre_process();
/**
* @brief kmodel推理
* @return None
*/
void inference();
/**
* @brief kmodel推理结果后处理
* @param frame_size 原始图像/帧宽高,用于将结果放到原始图像大小
* @param results 后处理之后的基于原始图像的检测结果集合
* @return None
*/
void post_process(FrameSize frame_size, vector<ob_det_res> &results);
private:
/**
* @brief 检查结果的初步处理
* @param data 模型输出一层的头指针
* @param frame_size 原始图像/帧宽高,用于将结果放到原始图像大小
* @param k 模型的第k层索引
* @return 处理后的检测框集合
*/
vector<ob_det_res> decode_infer(float* data, FrameSize frame_size, int k);
/**
* @brief 检查结果的初步处理
* @param data 模型输出一层的头指针
* @param frame_size 原始图像/帧宽高,用于将结果放到原始图像大小
* @param k 模型的第k层索引
* @return 处理后的检测框集合
*/
vector<vector<ob_det_res>> decode_infer_class(float* data, FrameSize frame_size, int k);
/**
* @brief 对检测结果进行非最大值抑制
* @param input_boxes 检测框集合
* @return None
*/
void nms(vector<ob_det_res>& input_boxes);
std::unique_ptr<ai2d_builder> ai2d_builder_; // ai2d构建器
runtime_tensor ai2d_in_tensor_; // ai2d输入tensor
runtime_tensor ai2d_out_tensor_; // ai2d输出tensor
uintptr_t vaddr_; // isp的虚拟地址
FrameCHWSize isp_shape_; // isp对应的地址大小
float ob_det_thresh; //检测框分数阈值
float ob_nms_thresh; //nms阈值
vector<string> labels; //类别名字
int num_class; //类别数
int strides[STRIDE_NUM]; //每层检测结果的分辨率缩减被数
float anchors[3][3][2]; //检测的预设anchor
bool nms_option;
int input_height; //模型输入高
int input_width; //模型输入宽
float *output_0; //读取kmodel输出
float *output_1; //读取kmodel输出
float *output_2; //读取kmodel输出
};
#endif
anchorbase_det.cc是anchorbase_det.h中目标检测相关前后处理接口的具体实现。
#include "anchorbase_det.h"
/*
*静态图推理构造函数,继承AIBase,参数初始化
*/
AnchorBaseDet::AnchorBaseDet(config_args args, const char *kmodel_file, const int debug_mode)
:ob_det_thresh(args.obj_thresh),ob_nms_thresh(args.nms_thresh),labels(args.labels), AIBase(kmodel_file,"AnchorBaseDet", debug_mode)
{
nms_option = args.nms_option;
num_class = labels.size();
memcpy(this->strides, args.strides, sizeof(args.strides));
memcpy(this->anchors, args.anchors, sizeof(args.anchors));
input_width = input_shapes_[0][3];
input_height = input_shapes_[0][2];
ai2d_out_tensor_ = this -> get_input_tensor(0);
}
/*
*视频流推理的构造函数,继承自AIBase,参数初始化
*/
AnchorBaseDet::AnchorBaseDet(config_args args, const char *kmodel_file, FrameCHWSize isp_shape, uintptr_t vaddr, uintptr_t paddr,const int debug_mode)
:ob_det_thresh(args.obj_thresh),ob_nms_thresh(args.nms_thresh),labels(args.labels), AIBase(kmodel_file,"AnchorBaseDet", debug_mode)
{
nms_option = args.nms_option;
num_class = labels.size();
memcpy(this->strides, args.strides, sizeof(args.strides));
memcpy(this->anchors, args.anchors, sizeof(args.anchors));
input_width = input_shapes_[0][3];
input_height = input_shapes_[0][2];
vaddr_ = vaddr;
isp_shape_ = isp_shape;
dims_t in_shape{1, isp_shape.channel, isp_shape.height, isp_shape.width};
ai2d_in_tensor_ = hrt::create(typecode_t::dt_uint8, in_shape, hrt::pool_shared).expect("create ai2d input tensor failed");
ai2d_out_tensor_ = this -> get_input_tensor(0);
Utils::padding_resize(isp_shape, {input_shapes_[0][3], input_shapes_[0][2]}, ai2d_builder_, ai2d_in_tensor_, ai2d_out_tensor_, cv::Scalar(114, 114, 114));
}
/*
*析构函数
*/
AnchorBaseDet::~AnchorBaseDet()
{
}
// 目标检测任务的单图推理预处理
void AnchorBaseDet::pre_process(cv::Mat ori_img)
{
ScopedTiming st(model_name_ + " pre_process image", debug_mode_);
std::vector<uint8_t> chw_vec;
Utils::bgr2rgb_and_hwc2chw(ori_img, chw_vec);
Utils::padding_resize({ori_img.channels(), ori_img.rows, ori_img.cols}, chw_vec, {input_shapes_[0][3], input_shapes_[0][2]}, ai2d_out_tensor_, cv::Scalar(114, 114, 114));
}
// 使用ai2d实现目标检测任务的视频流推理预处理
void AnchorBaseDet::pre_process()
{
ScopedTiming st(model_name_ + " pre_process video", debug_mode_);
size_t isp_size = isp_shape_.channel * isp_shape_.height * isp_shape_.width;
auto buf = ai2d_in_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
memcpy(reinterpret_cast<char *>(buf.data()), (void *)vaddr_, isp_size);
hrt::sync(ai2d_in_tensor_, sync_op_t::sync_write_back, true).expect("sync write_back failed");
ai2d_builder_->invoke(ai2d_in_tensor_, ai2d_out_tensor_).expect("error occurred in ai2d running");
}
//推理
void AnchorBaseDet::inference()
{
this->run();
this->get_output();
}
// 目标检测任务的后处理,包括从模型输出解析位置,解析类别,做NMS
void AnchorBaseDet::post_process(FrameSize frame_size, vector<ob_det_res> &results)
{
ScopedTiming st(model_name_ + " post_process", debug_mode_);
output_0 = p_outputs_[0];
output_1 = p_outputs_[1];
output_2 = p_outputs_[2];
if (nms_option)
{
vector<ob_det_res> box0, box1, box2;
box0 = decode_infer(output_0, frame_size, 0);
box1 = decode_infer(output_1, frame_size, 1);
box2 = decode_infer(output_2, frame_size, 2);
results.insert(results.begin(), box0.begin(), box0.end());
results.insert(results.begin(), box1.begin(), box1.end());
results.insert(results.begin(), box2.begin(), box2.end());
nms(results);
}
else
{
vector<vector<ob_det_res>> box0, box1, box2;
box0 = decode_infer_class(output_0, frame_size, 0);
box1 = decode_infer_class(output_1, frame_size, 1);
box2 = decode_infer_class(output_2, frame_size, 2);
for(int i = 0; i < num_class; i++)
{
box0[i].insert(box0[i].begin(), box1[i].begin(), box1[i].end());
box0[i].insert(box0[i].begin(), box2[i].begin(), box2[i].end());
nms(box0[i]);
results.insert(results.begin(), box0[i].begin(), box0[i].end());
}
}
}
vector<ob_det_res> AnchorBaseDet::decode_infer(float* data, FrameSize frame_size, int k)
{
int stride = strides[k];
float ratiow = (float)input_width / frame_size.width;
float ratioh = (float)input_height / frame_size.height;
float gain = ratiow < ratioh ? ratiow : ratioh;
std::vector<ob_det_res> result;
int grid_size_w = input_width / stride;
int grid_size_h = input_height / stride;
int one_rsize = num_class + 5;
float cx, cy, w, h;
for (int shift_y = 0; shift_y < grid_size_h; shift_y++)
{
for (int shift_x = 0; shift_x < grid_size_w; shift_x++)
{
int loc = shift_x + shift_y * grid_size_w;
for (int i = 0; i < 3; i++)
{
float* record = data + (loc * 3 + i) * one_rsize;
float* cls_ptr = record + 5;
for (int cls = 0; cls < num_class; cls++)
{
float score = (cls_ptr[cls]) * (record[4]);
if (score > ob_det_thresh)
{
cx = ((record[0]) * 2.f - 0.5f + (float)shift_x) * (float)stride;
cy = ((record[1]) * 2.f - 0.5f + (float)shift_y) * (float)stride;
w = pow((record[2]) * 2.f, 2) * anchors[k][i][0];
h = pow((record[3]) * 2.f, 2) * anchors[k][i][1];
cx -= ((input_width - frame_size.width * gain) / 2);
cy -= ((input_height - frame_size.height * gain) / 2);
cx /= gain;
cy /= gain;
w /= gain;
h /= gain;
ob_det_res box;
box.x1 = std::max(0, std::min(int(frame_size.width), int(cx - w / 2.f)));
box.y1 = std::max(0, std::min(int(frame_size.height), int(cy - h / 2.f)));
box.x2 = std::max(0, std::min(int(frame_size.width), int(cx + w / 2.f)));
box.y2 = std::max(0, std::min(int(frame_size.height), int(cy + h / 2.f)));
box.score = score;
box.label_index = cls;
box.label = labels[cls];
result.push_back(box);
}
}
}
}
}
return result;
}
vector<vector<ob_det_res>> AnchorBaseDet::decode_infer_class(float* data, FrameSize frame_size, int k)
{
int stride = strides[k];
float ratiow = (float)input_width / frame_size.width;
float ratioh = (float)input_height / frame_size.height;
float gain = ratiow < ratioh ? ratiow : ratioh;
std::vector<std::vector<ob_det_res>> result;
for (int i = 0; i < num_class; i++)
{
result.push_back(vector<ob_det_res>());//不断往v2d里加行
}
int grid_size_w = input_width / stride;
int grid_size_h = input_height / stride;
int one_rsize = num_class + 5;
float cx, cy, w, h;
for (int shift_y = 0; shift_y < grid_size_h; shift_y++)
{
for (int shift_x = 0; shift_x < grid_size_w; shift_x++)
{
int loc = shift_x + shift_y * grid_size_w;
for (int i = 0; i < 3; i++)
{
float* record = data + (loc * 3 + i) * one_rsize;
float* cls_ptr = record + 5;
for (int cls = 0; cls < num_class; cls++)
{
float score = (cls_ptr[cls]) * (record[4]);
if (score > ob_det_thresh)
{
cx = ((record[0]) * 2.f - 0.5f + (float)shift_x) * (float)stride;
cy = ((record[1]) * 2.f - 0.5f + (float)shift_y) * (float)stride;
w = pow((record[2]) * 2.f, 2) * anchors[k][i][0];
h = pow((record[3]) * 2.f, 2) * anchors[k][i][1];
cx -= ((input_width - frame_size.width * gain) / 2);
cy -= ((input_height - frame_size.height * gain) / 2);
cx /= gain;
cy /= gain;
w /= gain;
h /= gain;
ob_det_res box;
box.x1 = std::max(0, std::min(int(frame_size.width), int(cx - w / 2.f)));
box.y1 = std::max(0, std::min(int(frame_size.height), int(cy - h / 2.f)));
box.x2 = std::max(0, std::min(int(frame_size.width), int(cx + w / 2.f)));
box.y2 = std::max(0, std::min(int(frame_size.height), int(cy + h / 2.f)));
box.score = score;
box.label_index = cls;
box.label = labels[cls];
result[cls].push_back(box);
}
}
}
}
}
return result;
}
void AnchorBaseDet::nms(vector<ob_det_res>& input_boxes)
{
std::sort(input_boxes.begin(), input_boxes.end(), [](ob_det_res a, ob_det_res b) { return a.score > b.score; });
std::vector<float> vArea(input_boxes.size());
for (int i = 0; i < int(input_boxes.size()); ++i)
{
vArea[i] = (input_boxes.at(i).x2 - input_boxes.at(i).x1 + 1)
* (input_boxes.at(i).y2 - input_boxes.at(i).y1 + 1);
}
for (int i = 0; i < int(input_boxes.size()); ++i)
{
for (int j = i + 1; j < int(input_boxes.size());)
{
float xx1 = std::max(input_boxes[i].x1, input_boxes[j].x1);
float yy1 = std::max(input_boxes[i].y1, input_boxes[j].y1);
float xx2 = std::min(input_boxes[i].x2, input_boxes[j].x2);
float yy2 = std::min(input_boxes[i].y2, input_boxes[j].y2);
float w = std::max(float(0), xx2 - xx1 + 1);
float h = std::max(float(0), yy2 - yy1 + 1);
float inter = w * h;
float ovr = inter / (vArea[i] + vArea[j] - inter);
if (ovr >= ob_nms_thresh)
{
input_boxes.erase(input_boxes.begin() + j);
vArea.erase(vArea.begin() + j);
}
else
{
j++;
}
}
}
}
其他文件中,utils.h是工具结构体和函数的声明头文件,utils.cc是工具函数的具体实现;vi_vo.h是实现视频输入输出的头文件;json.h是json文件解析的头文件,程序运行的时候需要实现解析部署配置文件deploy.json,json.cpp是其接口的实现;scoped_timing.hpp是计时工具,用于统计运行时间。
main.cc是主函数,实现启动命令参数解析和静态图、视频流的推理。
/*
*实现静态图推理
*/
void image_proc_ob_det(config_args args, char *argv[])
{
//从参数中的静态图路径读取图片,创建cv::Mat
cv::Mat ori_img = cv::imread(argv[3]);
int ori_w = ori_img.cols;
int ori_h = ori_img.rows;
vector<ob_det_res> results;
// 实例初始化
AnchorBaseDet ob_det(args, argv[2], atoi(argv[4]));
//预处理
ob_det.pre_process(ori_img);
//推理
ob_det.inference();
//后处理
ob_det.post_process({ori_w, ori_h}, results);
//在结果上绘制检测框和类别
Utils::draw_ob_det_res(ori_img,results);
//保存检测结果图片
cv::imwrite("result_ob_det.jpg", ori_img);
}
下述代码是视频流推理的过程。
/*
*视频流推理
*/
void video_proc_ob_det(config_args args, char *argv[])
{
//启动video capture
vivcap_start();
//创建一帧的数据结构实例用于osd显示
k_video_frame_info vf_info;
void *pic_vaddr = NULL;
memset(&vf_info, 0, sizeof(vf_info));
//数据初始化
vf_info.v_frame.width = osd_width;
vf_info.v_frame.height = osd_height;
vf_info.v_frame.stride[0] = osd_width;
vf_info.v_frame.pixel_format = PIXEL_FORMAT_ARGB_8888;
block = vo_insert_frame(&vf_info, &pic_vaddr);
// alloc memory
size_t paddr = 0;
void *vaddr = nullptr;
size_t size = SENSOR_CHANNEL * SENSOR_HEIGHT * SENSOR_WIDTH;
int ret = kd_mpi_sys_mmz_alloc_cached(&paddr, &vaddr, "allocate", "anonymous", size);
if (ret)
{
std::cerr << "physical_memory_block::allocate failed: ret = " << ret << ", errno = " << strerror(errno) << std::endl;
std::abort();
}
//声明检测结果变量results,用于存放检测结果
vector<ob_det_res> results;
//实例初始化
AnchorBaseDet ob_det(args, argv[2], {SENSOR_CHANNEL, SENSOR_HEIGHT, SENSOR_WIDTH}, reinterpret_cast<uintptr_t>(vaddr), reinterpret_cast<uintptr_t>(paddr), atoi(argv[4]));
//while循环内依次获取一帧图像,经过AI模型推理过程输出并后处理,在OSD帧上绘制结果并插入到显示
while (!isp_stop)
{
ScopedTiming st("total time", 1);
{
ScopedTiming st("read capture", atoi(argv[4]));
// VICAP_CHN_ID_1 out rgb888p
memset(&dump_info, 0 , sizeof(k_video_frame_info));
// 将camera的当前帧dump到dump_info中
ret = kd_mpi_vicap_dump_frame(vicap_dev, VICAP_CHN_ID_1, VICAP_DUMP_YUV, &dump_info, 1000);
if (ret) {
printf("sample_vicap...kd_mpi_vicap_dump_frame failed.\n");
continue;
}
}
{
//将dump_info内的数据拷贝到AnchorBaseDet实例化时用到的地址vaddr
ScopedTiming st("isp copy", atoi(argv[4]));
auto vbvaddr = kd_mpi_sys_mmap_cached(dump_info.v_frame.phys_addr[0], size);
memcpy(vaddr, (void *)vbvaddr, SENSOR_HEIGHT * SENSOR_WIDTH * 3);
kd_mpi_sys_munmap(vbvaddr, size);
}
//检测结果清空
results.clear();
//预处理
ob_det.pre_process();
//推理
ob_det.inference();
//模型输出后处理
ob_det.post_process({SENSOR_WIDTH, SENSOR_HEIGHT},results);
//创建osd帧数据
cv::Mat osd_frame(osd_height, osd_width, CV_8UC4, cv::Scalar(0, 0, 0, 0));
{
//在osd的一帧上绘制检测框和检测类别
ScopedTiming st("osd draw", atoi(argv[4]));
Utils::draw_ob_det_res(osd_frame, results, {osd_width, osd_height}, {SENSOR_WIDTH, SENSOR_HEIGHT});
}
{
//将osd_frame中的数据拷贝到pic_vaddr
ScopedTiming st("osd copy", atoi(argv[4]));
memcpy(pic_vaddr, osd_frame.data, osd_width * osd_height * 4);
//显示通道插入帧
kd_mpi_vo_chn_insert_frame(osd_id+3, &vf_info);
printf("kd_mpi_vo_chn_insert_frame success \n");
ret = kd_mpi_vicap_dump_release(vicap_dev, VICAP_CHN_ID_1, &dump_info);
if (ret) {
printf("sample_vicap...kd_mpi_vicap_dump_release failed.\n");
}
}
}
//释放句柄
vo_osd_release_block();
//停止video capture
vivcap_stop();
// free memory
ret = kd_mpi_sys_mmz_free(paddr, vaddr);
if (ret)
{
std::cerr << "free failed: ret = " << ret << ", errno = " << strerror(errno) << std::endl;
std::abort();
}
}
k230_code/k230_deploy/CMakeLists.txt说明
这是k230_code/k230_deploy目录下的CMakeLists.txt脚本,设置编译的C++文件和生成的elf可执行文件名称,由下面:
set(src main.cc utils.cc ai_base.cc json.cpp anchorbase_det.cc)
set(bin main.elf)
#添加项目的根目录到头文件搜索路径中。
include_directories(${PROJECT_SOURCE_DIR})
#添加 nncase RISC-V 向量库的头文件目录
include_directories(${nncase_sdk_root}/riscv64/rvvlib/include)
#添加 k230 SDK 中的用户应用程序 API 头文件目录
include_directories(${k230_sdk}/src/big/mpp/userapps/api/)
#添加 k230 SDK 的mpp(Media Process Platform)头文件目录
include_directories(${k230_sdk}/src/big/mpp/include)
# 添加与mpp相关的头文件目录
include_directories(${k230_sdk}/src/big/mpp/include/comm)
#添加示例 VO(视频输出)应用程序头文件目录
include_directories(${k230_sdk}/src/big/mpp/userapps/sample/sample_vo)
#添加链接器搜索路径,指向 nncase RISC-V 向量库的目录
link_directories(${nncase_sdk_root}/riscv64/rvvlib/)
#创建一个可执行文件,将之前设置的源文件列表作为输入
add_executable(${bin} ${src})
#设置可执行文件需要链接的库。列表中列出了各种库,包括 nncase 相关的库、k230 SDK 的库,以及其他一些库
target_link_libraries(${bin} ...)
#将一些 OpenCV相关的库和其他一些第三方库链接到可执行文件中
target_link_libraries(${bin} opencv_imgproc opencv_imgcodecs opencv_core zlib libjpeg-turbo libopenjp2 libpng libtiff libwebp csi_cv)
# 安装生成的可执行文件到指定的目标路径(bin 目录)中
install(TARGETS ${bin} DESTINATION bin)
k230_code/CMakeLists.txt说明
cmake_minimum_required(VERSION 3.2)
project(nncase_sdk C CXX)
# 设置nncase的根目录,在src/big/nncase目录下,您也可设置为绝对路径
set(nncase_sdk_root "${PROJECT_SOURCE_DIR}/../../nncase/")
# 设置k230_sdk的根目录,当前是从nncase目录的三级父目录得到,您也可设置为绝对路径
set(k230_sdk ${nncase_sdk_root}/../../../)
#设置链接脚本路径,链接脚本放于k230_code/cmake下
set(CMAKE_EXE_LINKER_FLAGS "-T ${PROJECT_SOURCE_DIR}/cmake/link.lds --static")
# set opencv
set(k230_opencv ${k230_sdk}/src/big/utils/lib/opencv)
include_directories(${k230_opencv}/include/opencv4/)
link_directories(${k230_opencv}/lib ${k230_opencv}/lib/opencv4/3rdparty)
# set mmz
link_directories(${k230_sdk}/src/big/mpp/userapps/lib)
# set nncase
include_directories(${nncase_sdk_root}/riscv64)
include_directories(${nncase_sdk_root}/riscv64/nncase/include)
include_directories(${nncase_sdk_root}/riscv64/nncase/include/nncase/runtime)
link_directories(${nncase_sdk_root}/riscv64/nncase/lib/)
# 添加待编译子项目
add_subdirectory(k230_deploy)
k230_code/build_app.sh说明
#!/bin/bash
set -x
# set cross build toolchain
# 将交叉编译工具链的路径添加到系统的 PATH 环境变量中,以便在后续的命令中使用。该工具链是使用的大核编译工具链。
export PATH=$PATH:/opt/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/
clear
rm -rf out
mkdir out
pushd out
cmake -DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=`pwd` \
-DCMAKE_TOOLCHAIN_FILE=cmake/Riscv64.cmake \
..
make -j && make install
popd
# 生成的main.elf可以在k230_code目录下的k230_bin文件夹下找到
k230_bin=`pwd`/k230_bin
rm -rf ${k230_bin}
mkdir -p ${k230_bin}
if [ -f out/bin/main.elf ]; then
cp out/bin/main.elf ${k230_bin}
fi
10.2.5.3 代码编译#
将项目中的k230_code文件夹拷贝到k230_sdk目录下的src/big/nncase下,执行编译脚本,将C++代码编译成main.elf可执行文件。
# 如果烧录的是Linux+RT-Smart双系统镜像,在k230_SDK根目录下执行
make CONF=k230_canmv_defconfig prepare_memory
# 如果烧录的是纯RT-Smart单系统镜像,在k230_SDK根目录下执行
make CONF=k230_canmv_only_rtt_defconfig prepare_memory
# 回到当前项目目录,赋予权限
chmod +x build_app.sh
./build_app.sh
10.2.5.4 准备ELF文件#
后面部署步骤需要用到的文件包括:
k230_code/k230_bin/main.elf;
10.2.6 网络配置与文件拷贝#
将待使用文件拷贝到开发板上有三种方式可供选择。
10.2.6.1 离线文件拷贝#
注: 该方法适用于Linux+RT-Smart双系统镜像和纯RT-Smart单系统镜像;
通过插拔SD卡,将所需文件拷贝到相应位置,对于Linux+RT-Smart双系统,SD卡根目录映射到大小核的/sharefs目录下;对于纯RT-Smart单系统,SD卡根目录映射到大核的/sdcard目录下;
10.2.6.2 tftp文件传输#
注:该方法只适用于Linux+RT-Smart双系统镜像;纯RT-Smart单系统请选择离线拷贝方法;
Windows系统PC端网络配置
控制面板->网络和共享中心->更改适配器设置->以太网网卡->右键属性->选中(TCP/IPv4)->属性
配置IP地址、掩码、网关,配置DNS服务器地址:
开发板网络配置
进入小核命令行,执行:
# 查看是否有eth0
ifconfig
# 配置开发板IP,和PC在同一网段下
ifconfig eth0 192.168.1.22
# 查看IP配置
ifconfig
工具:tftpd64
安装tftp通信工具,下载地址:https://bitbucket.org/phjounin/tftpd64/downloads/
启动tftpd64,配置待传输文件存放目录和服务网卡
sharefs说明
# 进入小核根目录
cd /
# 查看目录
ls
# sharefs目录是大小核共用目录,因此从小核拷贝到sharefs目录下的文件对大核也可见
文件传输
# 以下代码在小核串口执行
# 将PC上tftpd64配置文件存放目录中的文件传输至开发板的当前目录
tftp -g -r your_file 192.168.1.2
# 将开发板当前目录下的文件传输至tftpd64配置文件存放目录
tftp -p -r board_file 192.168.1.2
10.2.6.2 scp文件传输#
注:该方法只适用于Linux+RT-Smart双系统镜像;纯RT-Smart单系统请选择离线拷贝方法;
在Linux系统中,PC正常连接网络,开发板可以通过网线连接PC所在网关下其他网口,通过scp命令实现文件传输。
开发板上电,进入大小核COM界面,在小核执行scp传输命令:
# 从PC拷贝文件至开发板
scp 用户名@域名或IP:文件所在目录 开发板目的目录
#拷贝文件夹
scp -r 用户名@域名或IP:文件所在目录 开发板目的目录
# 从开发板拷贝文件至PC
scp 开发板待拷贝目录 用户名@域名或IP:PC目的目录
# 拷贝文件夹
scp -r 开发板待拷贝目录 用户名@域名或IP:PC目的目录
10.2.7 K230端部署#
10.2.7.1 板端部署过程#
按照上节提供的文件拷贝过程,将模型训练和测试部分准备好的文件和C++代码编译部分准备好的elf文件拷贝到开发板。Linux+RT-Smart双系统在/sharefs下,纯RT-Smart在/sdcard下,创建文件夹test_det:
test_det
├──best.kmodel
├──deploy.json
├──main.elf
├──test.jpg
执行静态图推理,执行下述代码(注意:代码需在大核下执行):
# Linux+RT-Smart双系统
cd /sharefs/test_det
# 纯RT-Smart单系统
cd /sdcard/test_det
"模型推理时传参说明:<config_file> <kmodel_det> <input_mode> <debug_mode>"
"Options:"
" config_file 部署所用json配置文件,默认为 deploy_config.json"
" kmodel_det kmodel路径"
" input_mode 本地图片(图片路径)/ 摄像头(None)"
" debug_mode 是否需要调试,0、1、2分别表示不调试、简单调试、详细调试"
main.elf deploy.json best.kmodel test.jpg 2
如执行摄像头视频流推理,执行下述代码:
main.elf deploy.json best.kmodel None 2
10.2.7.2 上板部署效果#
静态图推理图示:
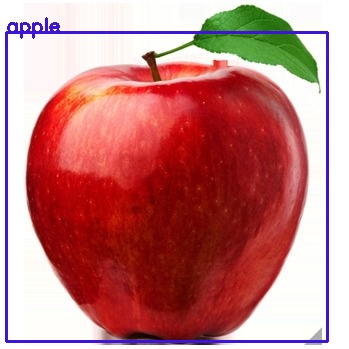
视频流推理图示: