K230 SDK使用说明#
1. 概述#
1.1 SDK软件架构概述#
K230 SDK 是面向K230 开发板的软件开发包,包含了基于Linux&RT-smart 双核异构系统及RT-smart单系统开发需要用到的源代码,工具链和其他相关资源。
K230 SDK Linux+RT-smart双系统软件架构层次如图 1-1 所示:
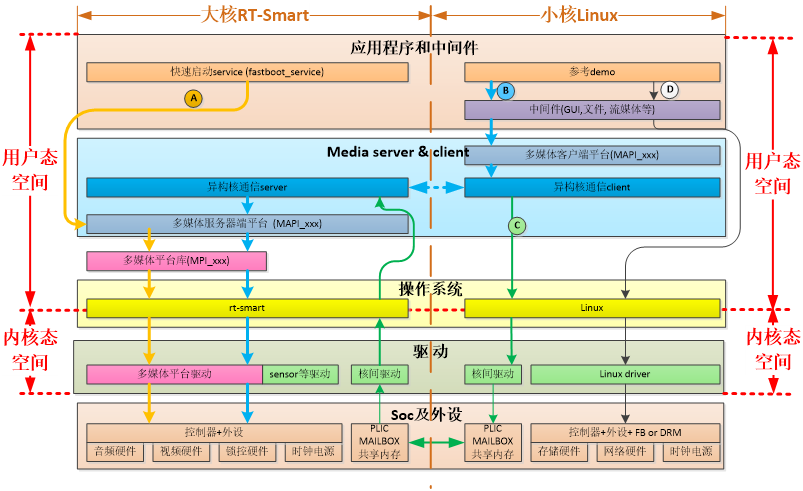
图1-1 K230 SDK 软件架构图
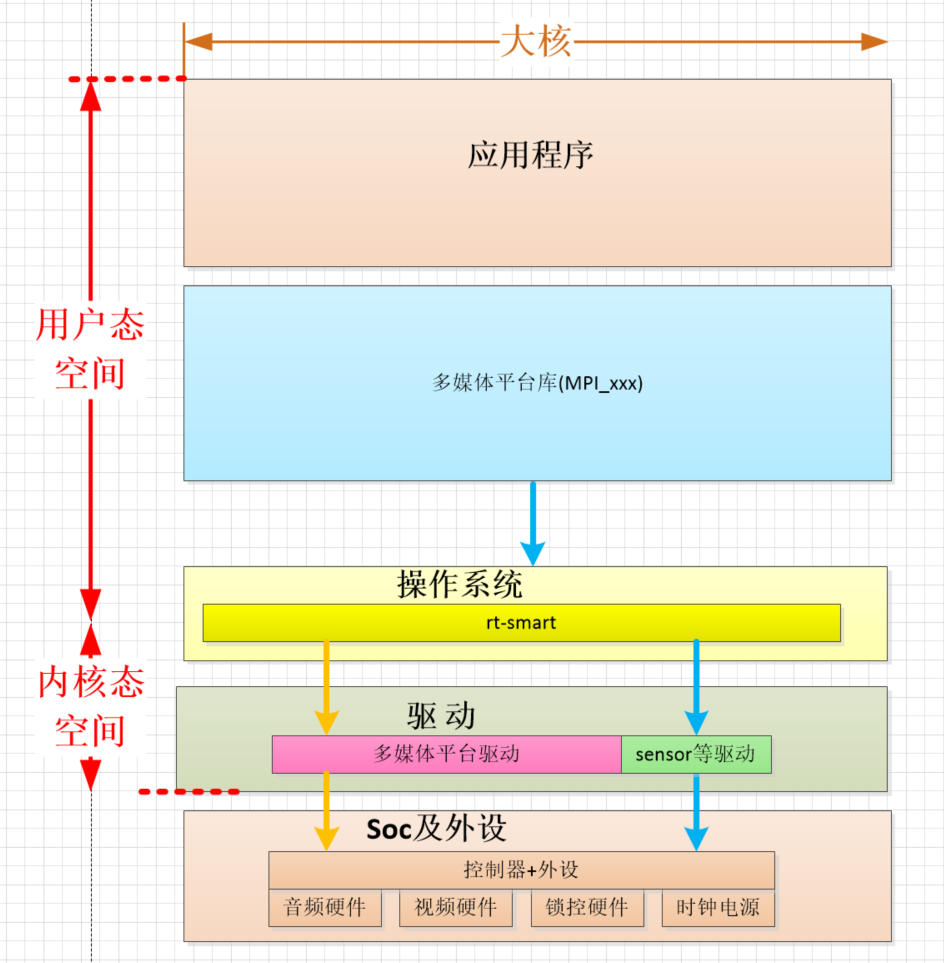
K230 SDK RT-smart 单系统软件架构层次如图 1-2 所示:
2. 开发环境搭建#
2.1 支持的硬件#
K230平台支持的硬件信息文档可以参考目录:00_hardware , 其中不同主板的硬件信息文档目录如下:
主板类型 |
主板硬件参考目录 |
|---|---|
CanMV-K230 |
具体硬件信息参考: 00_hardware |
2.2 开发环境搭建#
2.2.1 编译环境#
主机环境 |
描述 |
|---|---|
Docker编译环境 |
SDK提供了dockerfile,可以生成docker镜像,用于编译SDK |
Ubuntu 20.04.4 LTS (x86_64) |
SDK可以在ubuntu 20.04环境下编译 |
K230 SDK需要在linux环境下编译,SDK支持docker环境编译,SDK开发包中发布了docker file(tools/docker/Dockerfile),可以生成docker镜像。具体dockerfile使用和编译步骤,详见4.3.1章节。
SDK使用的Docker 镜像以ubuntu 20.04 为基础,如果不使用docker编译环境,可以在ubuntu 20.04 主机环境下参考dockerfile的内容,安装相关HOST package和工具链后,编译SDK。
K230 SDK没有在其他Linux版本的主机环境下验证过,不保证SDK可以在其他环境下编译通过。
2.2.2 SDK开发包#
K230 SDK以压缩包的形式发布,或者自己使用git clone https://github.com/kendryte/k230_sdk命令下载。
2.3 单板准备#
本章节以CanMV-K230 主板使用为例
2.3.1 CanMV-K230#
请准备如下硬件:
CanMV-K230
TypeC USB线 至少1根
网线一根(可选)
HDMI线一根
SD卡
支持HDMI的显示器
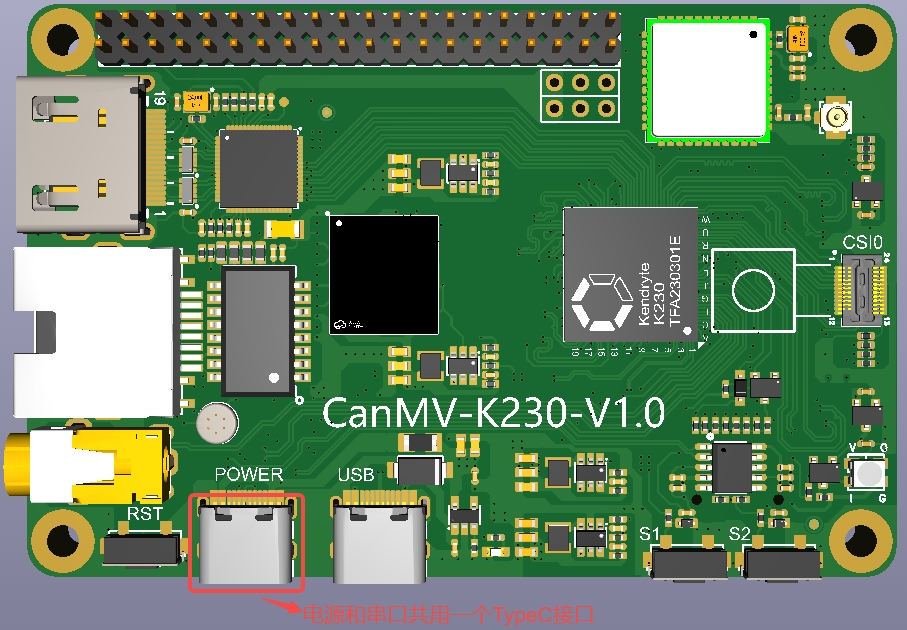
说明:CanMV-K230主板电源和串口共用一个TypeC口,如下图:
2.3.3 串口#
K230 主板通过USB提供两路调试串口,windows下使用调试串口,需要安装USB转串口驱动程序,驱动下载链接如下:
https://ftdichip.com/wp-content/uploads/2021/11/CDM-v2.12.36.4.U-WHQL-Certified.zip
安装了驱动后,板子上电,PC使用type C数据线连接主板的调试串口后,可以发现两个USB串口设备,如下图所示:
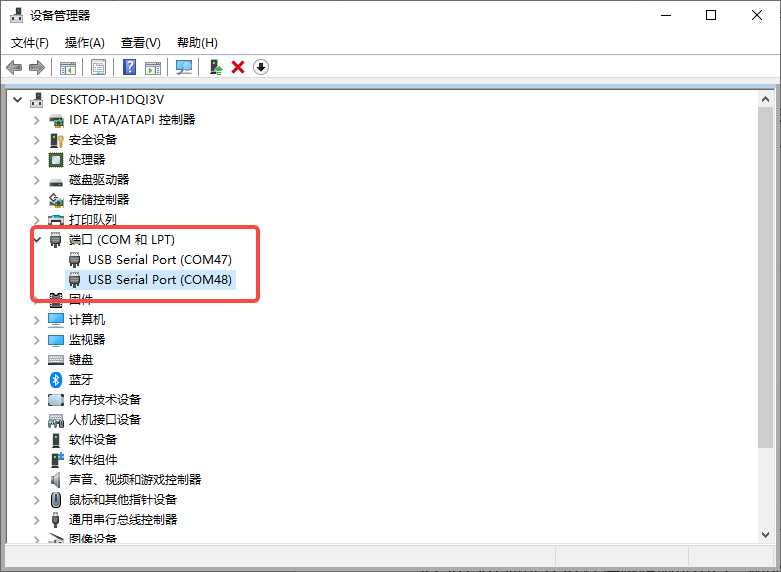
图2-1 USB串口设备
以上图为例,COM47为小核的调试串口,COM48为大核的调试串口。
串口波特率设置: 115200 8N1
3. SDK 安装准备工作#
3.1 安装SDK#
K230 SDK开发包采用压缩包的方式发布,在linux环境下使用。
3.2 SDK 目录结构#
K230 SDK目录结构如下图所示:
k230_sdk
├── configs
│ ├── k230_canmv_defconfig
│ └── k230_canmv_only_rtt_defconfig
├── Kconfig
├── LICENSE
├── Makefile
├── parse.mak
├── README.md
├── repo.mak
├── src
│ ├── big
│ │ ├── mpp
│ │ ├── rt-smart
│ │ └── unittest
│ ├── common
│ │ ├── cdk
│ │ └── opensbi
│ ├── little
│ │ ├── buildroot-ext
│ │ ├── linux
│ │ └── uboot
│ └── reference
│ ├── ai_poc
│ ├── business_poc
│ └── fancy_poc
├── board
│ ├── common
│ │ ├── env
│ │ └── gen_image_cfg
│ │ ├── gen_image_script
│ │ └── post_copy_rootfs
│ ├── k230_evb_doorlock
│ └── k230_evb_peephole_device
└── tools
├── docker
│ └── Dockerfile
├── doxygen
├── firmware_gen.py
└── get_download_url.sh
各个目录用途描述如下:
configs: 存放SDK的板级默认配置,主要包含如下信息:参考板类型,toolchain路径,内存布局规划,存储规划配置等
src:源代码目录,分为 大核代码(big),公共组件(common),小核代码(little)三个目录。大核代码包含:
rt-smart操作系统代码,mpp代码,unittest代码公共组件包含:
cdk代码和opensbi代码小核代码包含:
linux内核代码,buildroot代码,uboot代码tools:存放各种工具,脚本等。例如kconfig,doxygen,dockerfile等board:环境变量、镜像配置文件、文件系统等
4. SDK 编译#
4.1 SDK 编译介绍#
K230 SDK支持一键编译大小核操作系统和公共组件,生成可以烧写的镜像文件,用于部署到开发板启动运行。设备上linux系统的用户名是root无密码;
4.2 SDK 配置#
K230 SDK采用Kconfig作为SDK配置接口,默认支持的板级配置放在configs目录下。
4.2.1 部分配置文件说明#
k230_canmv_defconfig :基于CanMV-K230 V1.0/V1.1 的Linux+RTT双系统配置文件,为默认配置文件
k230_canmv_only_rtt_defconfig :基于Canmv-K230 V1.0/V1.1 板RT-smart单系统配置文件
4.3 编译 SDK#
4.3.1 编译步骤#
说明:本章节命令仅供参考,文件名请根据实际情况进行替换。 Setp 1:下载代码
git clone https://github.com/kendryte/k230_sdk
Step 2:进入SDK根目录
cd k230_sdk
Step 3:下载toolchain
source tools/get_download_url.sh && make prepare_sourcecode
make prepare_sourcecodewill download both Linux and RT-Smart toolchain, buildroot package and AI package from Microsoft Azure cloud server with CDN, the download cost time may based on your network connection speed.
Step 4:生成docker镜像(第一次编译需要,已经生成docker镜像后跳过此步骤)
docker build -f tools/docker/Dockerfile -t k230_docker tools/docker
Step 5: 进入docker环境,
docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) k230_docker /bin/bash
Step 6: Docker环境下执行下面命令进行编译SDK
make CONF=k230_canmv_defconfig #编译CanMV-K230 1.0/1.1 板子Linux+RTT双系统镜像
make CONF=k230_canmv_only_rtt_defconfig #编译CanMV-K230 1.0/1.1 板子RTT-only系统镜像
备注: sdk不支持多进程编译,不要增加类似-j32多进程编译参数。
4.3.2 编译输出产物#
编译完成后,在output/xx_defconfig/images目录下可以看到编译输出产物。ls
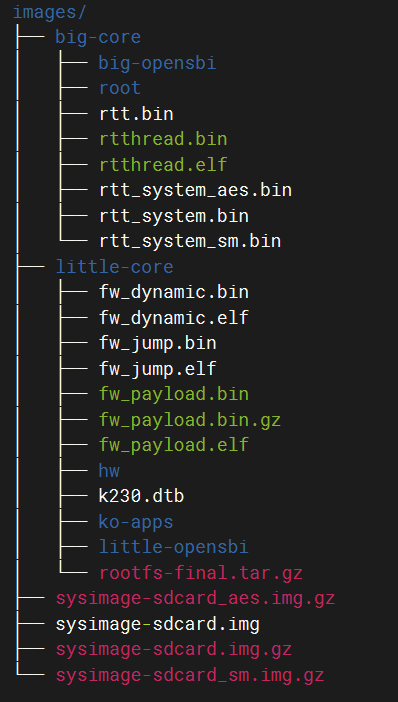
图4-1 编译产物
images目录下镜像文件说明如下:
sysimage-sdcard.img ————-是sd和emmc的非安全启动镜像;
sysimage-sdcard.img.gz ——–是SD和emmc的非安全启动镜像压缩包(sysimage-sdcard.img文件的gzip压缩包),烧录时需要先解压缩。
sysimage-sdcard_aes.img.gz是SD和emmc的aes安全启动镜像压缩包,烧录时需要先解压缩。
sysimage-sdcard_sm.img.gz是SD和emmc的sm安全启动镜像压缩包,烧录时需要先解压缩。
安全镜像默认不会产生,如果需要安全镜像请参考4.3.4使能安全镜像。
大核系统的编译产物放在images/big-core目录下。
小核系统的编译产物放在images/little-core目录下。
4.3.3 非快起镜像#
sdk默认编译的是快起镜像(uboot直接启动系统,不会进入uboot命令行),如果需要进入uboot命令行,请参考下面取消CONFIG_QUICK_BOOT配置:
在sdk主目录 执行 make menuconfig ,选择board configuration,取消quick boot 配置选项。
非快起系统变快起系统方法:进入uboot命行执行setenv quick_boot true;saveenv;
4.3.4 安全镜像#
sdk默认不产生安全镜像,如果需要安全镜像,请参考下面增加CONFIG_GEN_SECURITY_IMG配置:
在sdk主目录 执行make menuconfig ,选择board configuration,配上create security image 选项。
4.3.5 debug镜像#
sdk默认产生release镜像,如果需要调试镜像,请参考下面增加CONFIG_BUILD_DEBUG_VER配置:
在sdk主目录 执行make menuconfig ,选择build debug/release version,配上debug 选项。
5. SDK 镜像烧写#
根据不同主板的硬件特性和软件需求,请选择支持的镜像烧写方式。
CanMV-K230主板仅支持sd卡镜像启动。
5.1 sd卡镜像烧录#
5.1.1 ubuntu下烧录#
在sd卡插到宿主机之前,输入:
ls -l /dev/sd\*
查看当前的存储设备。
将sd卡插入宿主机后,再次输入:
ls -l /dev/sd\*
查看此时的存储设备,新增加的就是 sd 卡设备节点。
假设/dev/sdc 就是 sd卡设备节点,执行如下命令烧录SD卡:
sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync
说明:sysimage-sdcard.img可以是images目录下的sysimage-sdcard.img文件,或者sysimage-sdcard_aes.img.gz、sysimage-sdcard.img.gz、sysimage-sdcard_sm.img.gz文件解压缩后的文件。
5.1.2 Windows下烧录#
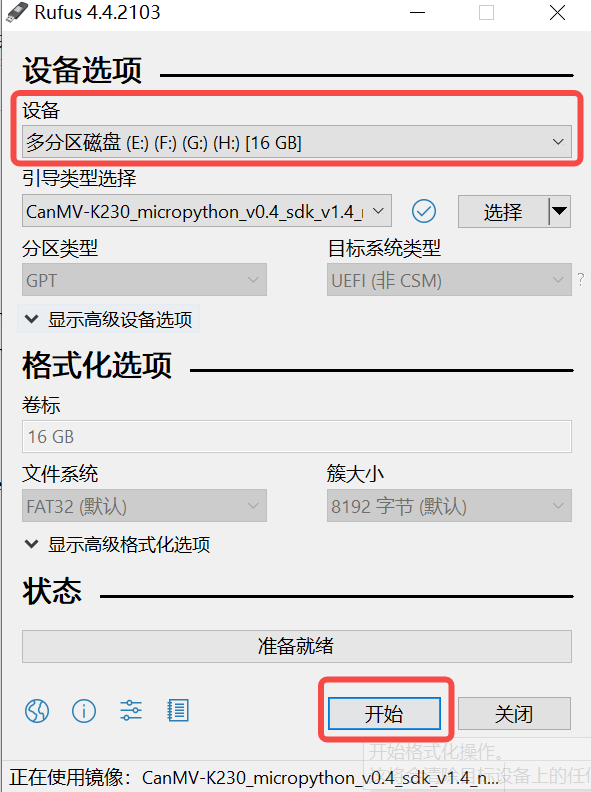
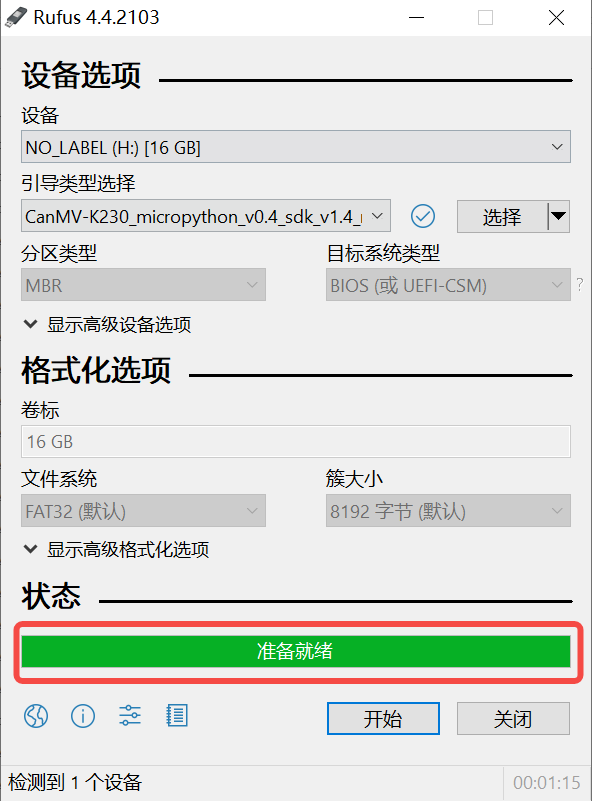
Windows下可通过rufus工具对TF卡进行烧录(rufus工具下载地址 http://rufus.ie/downloads/)。
1)将TF卡插入PC,然后启动rufus工具,点击工具界面的”选择”按钮,选择待烧写的固件。
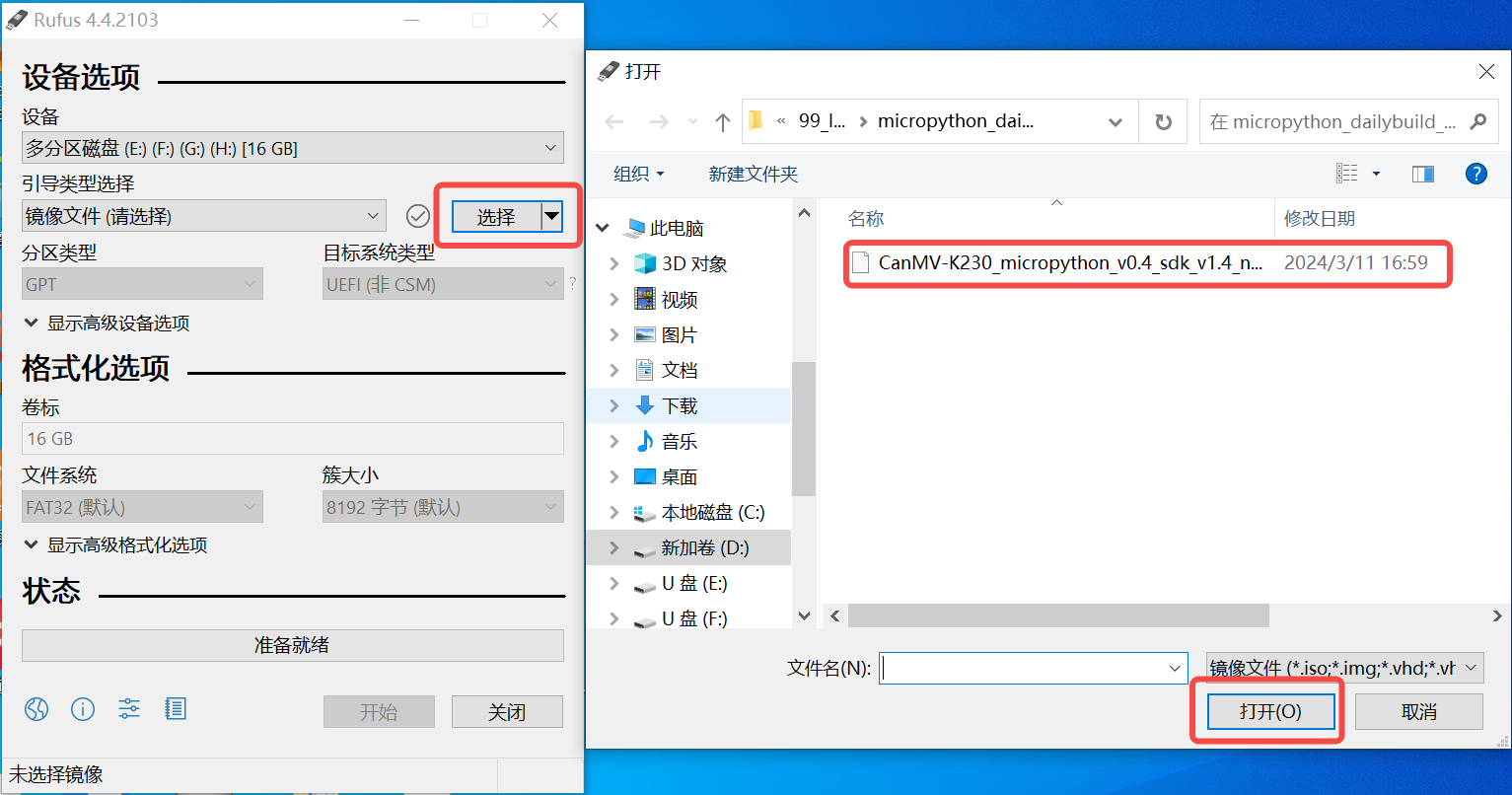
2)点击“开始”按钮开始烧写,烧写过程有进度条展示,烧写结束后会提示“准备就绪”。
5.2 Emmc镜像烧写参考#
5.2.1 Linux下烧写emm参考#
1)把镜像的压缩包下载到sd卡
从sd卡启动linux,在linux下可以参考如下命令把镜像的压缩包下载到sd卡
ifconfig eth0 up;udhcpc;mount /dev/mmcblk1p4 /mnt;cd /mnt/;
scp wangjianxin@10.10.1.94:/home/wangjianxin/k230_sdk/output/k230_evb_defconfig/images/sysimage-sdcard.img.gz .
2)把压缩包解压缩到emmc
gunzip sysimage-sdcard.img.gz -c >/dev/mmcblk0
3)切成emmc启动,重启板子
RTT-only无法使用此方法
5.2.1 Uboot下烧写emmc参考#
1)把ssysimage-sdcard.img.gz镜像下载到内存。
usb start; dhcp; tftp 0x900000010.10.1.94:wjx/sysimage-sdcard.img.gz;
#注意:需要根据内存大小替换下0x9000000,比如内存只有128M的话,可以替换为0x2400000
2)把镜像写到emmc
gzwrite mmc 0 0x${fileaddr} 0x${filesize};
3)重启板子
6. SDK内存配置#
在k230_sdk下运行make menuconfig->Memory configuration可以配置各个区域使用的内存空间,也可以直接编译configs/k230_canmv_defconfig修改,各区域说明如下
CONFIG_MEM_TOTAL_SIZE="0x20000000" #内存总体容量 不支持配置
CONFIG_MEM_PARAM_BASE="0x00000000" #参数分区起始地址 不支持配置
CONFIG_MEM_PARAM_SIZE="0x00100000" #参数分区大小 不支持配置
CONFIG_MEM_IPCM_BASE="0x00100000" #核间通讯起始地址 不支持配置
CONFIG_MEM_IPCM_SIZE="0x00100000" #核间通讯共享内存大小 不支持配置
CONFIG_MEM_RTT_SYS_BASE="0x00200000" #大核RTT起始地址 支持配置
CONFIG_MEM_RTT_SYS_SIZE="0x07E00000" #大核RTT使用的地址范围 支持配置
CONFIG_MEM_AI_MODEL_BASE="0x1FC00000" #AI模型加载起始地址 支持配置
CONFIG_MEM_AI_MODEL_SIZE="0x00400000" #AI模型加载地址区域 支持配置
CONFIG_MEM_LINUX_SYS_BASE="0x08000000" #小核linux起始地址 支持配置
CONFIG_MEM_LINUX_SYS_SIZE="0x08000000" #小核linux地址区域 支持配置
CONFIG_MEM_MMZ_BASE="0x10000000" #mmz共享内存其实地址 支持配置
CONFIG_MEM_MMZ_SIZE="0x0FC00000" #mmz 共享内存区域 支持配置
CONFIG_MEM_BOUNDARY_RESERVED_SIZE="0x00001000" #隔离区 不支持配置
CONFIG_MEM_LINUX_SYS_BASE 地址需要2MB对齐
RTT-only系统没有Linux内存的配置
8. SDK单板调试#
CanMV-K230主板由于的调试口默认是串口功能,如果需要调试请参考sdk常见问题解答。
8.1 调试前准备#
1.从 T-Head官网 https://www.xrvm.cn/community/download 下载XuanTie DebugServer软件和《Debugger Server User Guide(ZH-CN).pdf》,并参考《Debugger Server User Guide(ZH-CN).pdf》在pc电脑上安装XuanTie DebugServer软件;

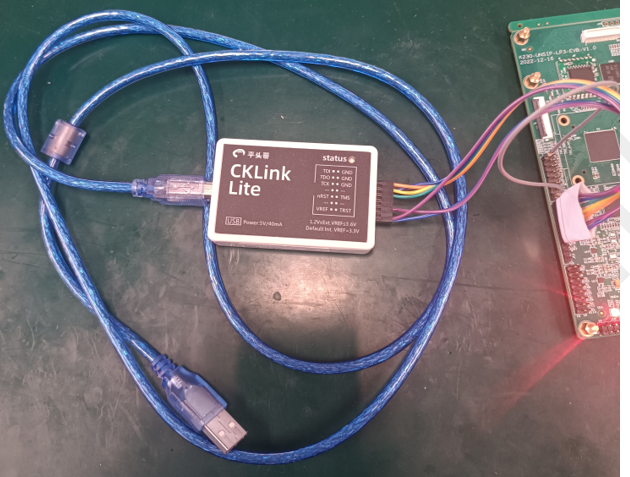
2.准备下图所示平头哥 cklink、usb线、k230 evb板
8.2 调试#
1.参考下图把cklink 、k230 evb板子、pc电脑 连接起来,随后给evb上电。

2.电脑上打开第1步安装的T-HeadDebugServer软件,看到类似如下图打印说明连接成功,如果连接失败请参考《DebugServer User Guide 》排查失败原因。
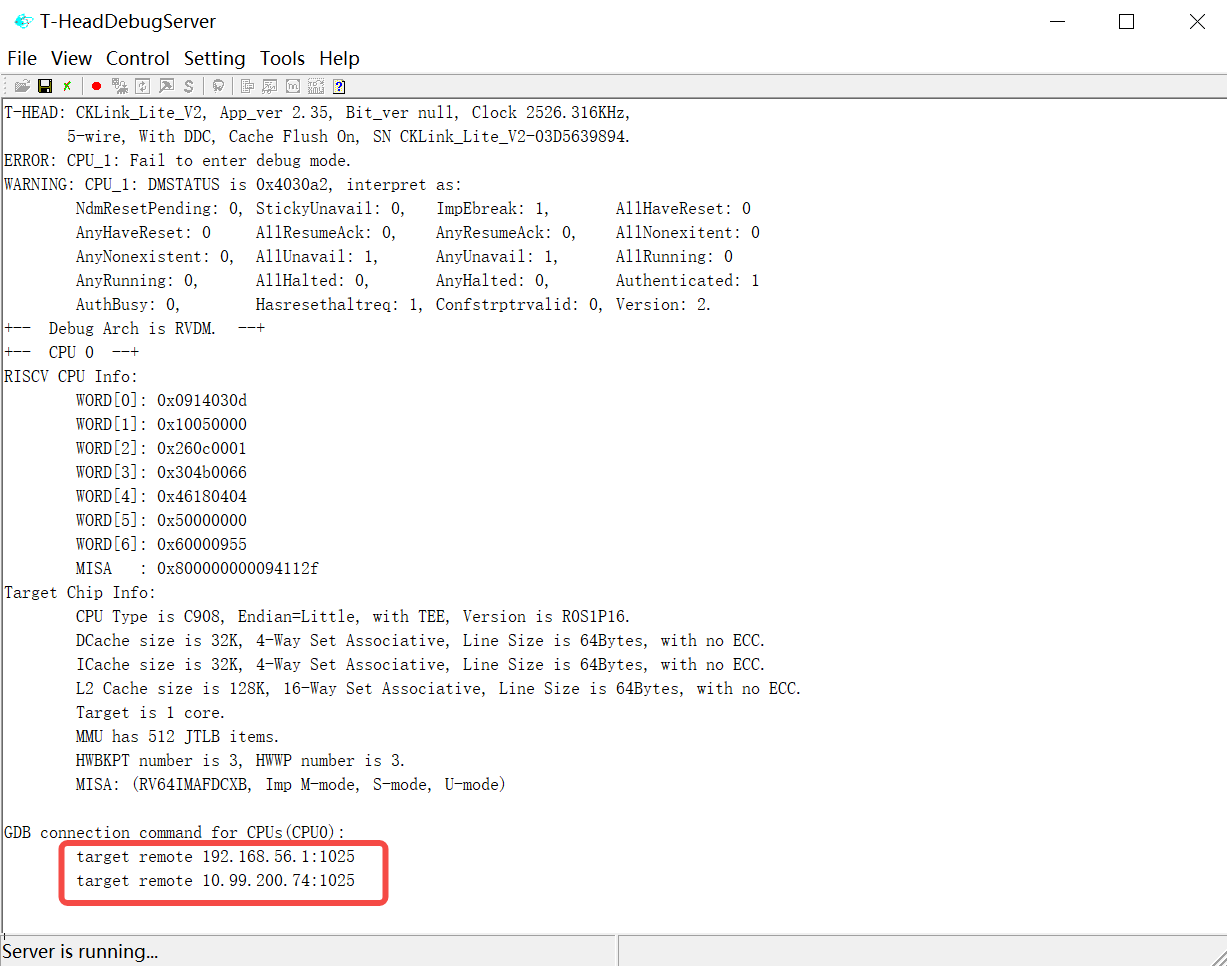
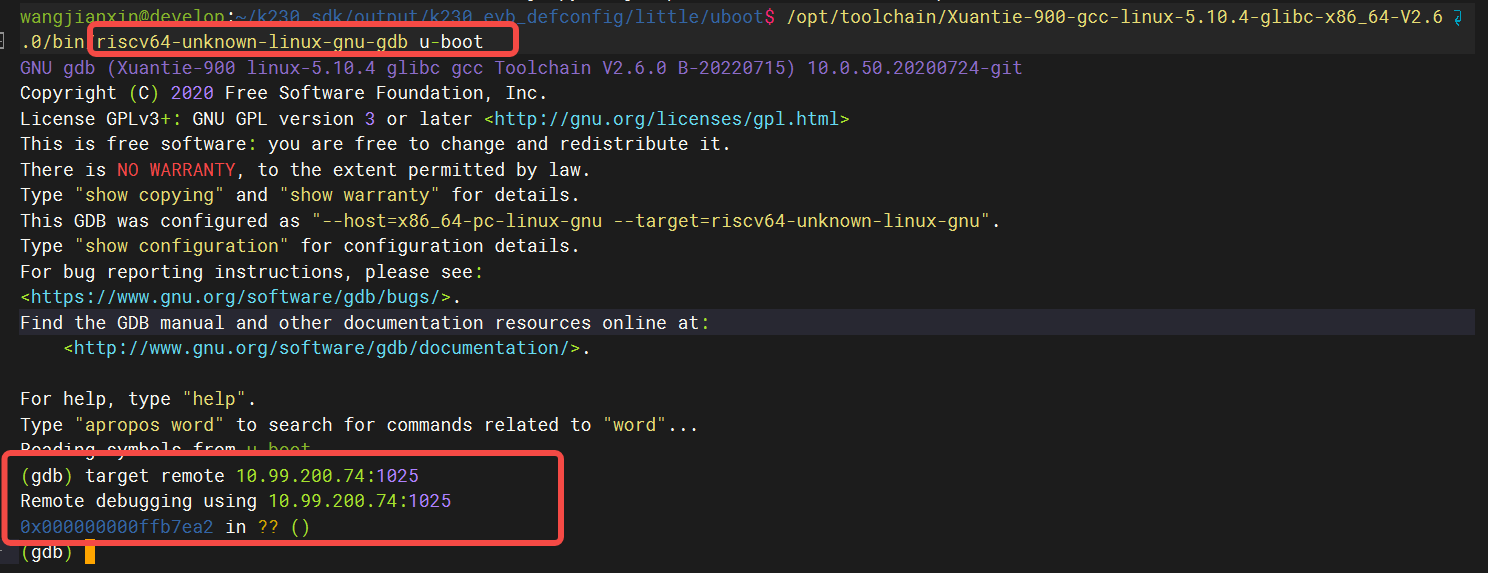
3.在编译代码的服务器上启动riscv64-unknown-linux-gnu-gdb执行target remote xx.xx.xx.xx1025 命令连接板子,连接成功后进行gdb调试。
9. SDK启动#
当前版本默认编译生成的镜像,烧录到板子上后,大核会自动运行一个人脸检测程序,显示屏上会显示摄像头采集的图片;启动后可以在大核的控制台端输入’q’退出该程序。
EVB系列主板如果没有连接IMX335摄像头,则自启动程序报错,程序自动退出,按回车即可回到控制台。
若需要取消大核的自启动功能,需将
k230_sdk/src/big/rt-smart/init.sh中的内容注释掉。
10.k230 debian和ubuntu 镜像说明#
镜像及构建方法详见K230_debian_ubuntu说明.md
上文有关Linux相关的内容不适用于RTT-only系统