3. K230 AI Demo 概述 #
本章针对K230提供了50多个覆盖多模态的AI Demo应用示例,并开放了源码,提供了使用文档;用户可以通过本章概览AI Demo的应用场景,并在k230开发板上体验;同时参考源码开发基于其他场景的应用demo。
注:对于K230D芯片,一些demo受到内存限制无法运行。
3.1 概述#
K230 AI Demo集成了人脸、人体、手部、车牌、单词续写、语音、dms等模块,包含了分类、检测、分割、识别、跟踪、单目测距等多种功能,给客户提供如何使用K230开发AI相关应用的参考。
3.2 Demo列表#
源码路径位于k230 sdk根目录下的src/reference/ai_poc(k230_sdk/src/reference/ai_poc at main · kendryte/k230_sdk (github.com)或src/reference/ai_poc · kendryte/k230_sdk - 码云 - 开源中国 (gitee.com)),关于每个demo的介绍,请参考下表链接文档:
Demo 子目录 |
说明 |
github链接 |
gitee链接 |
K230 |
K230D |
备注 |
|---|---|---|---|---|---|---|
anomaly_det |
异常检测 |
√ |
||||
bytetrack |
多目标跟踪 |
√ |
√ |
|||
crosswalk_detect |
人行横道检测 |
√ |
√ |
|||
dec_ai_enc |
h265解码器+AI+h265编码器 |
√ |
||||
demo_mix |
demo串烧合集 |
√ |
k230_sdk<=1.3 |
|||
distraction_reminder |
分神提醒 |
√ |
√ |
|||
dms_system |
驾驶员监控系统 |
√ |
√ |
|||
dynamic_gesture |
动态手势识别 |
√ |
√ |
|||
eye_gaze |
注视估计 |
√ |
||||
face_alignment |
人脸对齐 |
√ |
||||
face_detection |
人脸检测 |
√ |
√ |
|||
face_emotion |
面部表情识别 |
√ |
√ |
|||
face_gender |
性别分类 |
√ |
√ |
|||
face_glasses |
是否佩戴眼镜分类 |
√ |
√ |
|||
face_landmark |
人脸密集关键点 |
√ |
√ |
|||
face_mask |
是否佩戴口罩分类 |
√ |
√ |
|||
face_mesh |
3D人脸网格 |
√ |
||||
face_parse |
人脸分割 |
√ |
√ |
|||
face_pose |
人脸姿态估计 |
√ |
√ |
|||
face_verification |
人脸身份验证 |
√ |
√ |
|||
falldown_detect |
跌倒检测 |
√ |
√ |
|||
finger_guessing |
猜拳游戏 |
√ |
√ |
|||
fitness |
动作计数 |
√ |
√ |
|||
head_detection |
人头检测 |
√ |
√ |
|||
helmet_detect |
安全帽检测 |
√ |
√ |
|||
kws |
关键词唤醒 |
√ |
||||
licence_det |
车牌检测 |
√ |
√ |
|||
licence_det_rec |
车牌识别 |
√ |
√ |
|||
llamac |
英文单词续写 |
√ |
仅Linux运行,RT-Smart不支持 |
|||
nanotracker |
单目标跟踪 |
√ |
√ |
|||
object_detect_yolov8n |
YOLOV8多目标检测 |
√ |
√ |
|||
ocr |
ocr检测+识别 |
√ |
||||
person_attr |
人体属性 |
√ |
√ |
|||
person_detect |
人体检测 |
√ |
√ |
|||
person_distance |
行人测距 |
√ |
√ |
|||
pose_detect |
人体关键点检测 |
√ |
√ |
|||
pphumanseg |
人像分割 |
√ |
√ |
|||
puzzle_game |
拼图游戏 |
√ |
√ |
|||
segment_yolov8n |
YOLOV8多目标分割 |
√ |
√ |
|||
self_learning |
自学习(度量学习分类) |
√ |
√ |
|||
smoke_detect |
吸烟检测 |
√ |
√ |
|||
space_resize |
手势隔空缩放 |
√ |
√ |
|||
sq_hand_det |
手掌检测 |
√ |
√ |
|||
sq_handkp_class |
手掌关键点手势分类 |
√ |
√ |
|||
sq_handkp_det |
手掌关键点检测 |
√ |
√ |
|||
sq_handkp_flower |
指尖区域花卉分类 |
√ |
√ |
|||
sq_handkp_ocr |
手指区域OCR识别 |
√ |
√ |
|||
sq_handreco |
手势识别 |
√ |
√ |
|||
traffic_light_detect |
交通信号灯检测 |
√ |
√ |
|||
translate_en_ch |
英翻中翻译 |
√ |
||||
tts_zh |
中文转语音 |
√ |
||||
vehicle_attr |
车辆属性识别 |
√ |
√ |
|||
virtual_keyboard |
隔空虚拟键盘 |
√ |
√ |
|||
yolop_lane_seg |
路面车道线分割 |
√ |
√ |
kmodel、image及相关依赖路径位于/mnt/src/big/kmodel/ai_poc,目录结构如下:
.
│ # images目录下为demo推理的测试图片或测试数据
├── images
│ # kmodel目录下为demo所需的所有kmodel模型
├── kmodel
│ # utils目录下存放的是demo推理所用的工具文件
└── utils
3.3 编译及运行程序#
本章节基于kendryte/k230_sdk: Kendryte K230 SDK (github.com)或kendryte/k230_sdk - 码云 - 开源中国 (gitee.com)的最新版本源码实现。
按照kendryte/k230_sdk: Kendryte K230 SDK (github.com)或kendryte/k230_sdk - 码云 - 开源中国 (gitee.com)构建docker容器,编译上板镜像;
# 下载docker编译镜像 docker pull ghcr.io/kendryte/k230_sdk # 可以使用以下命令确认docker镜像是否拉取成功 docker images | grep ghcr.io/kendryte/k230_sdk # 下载sdk源码 git clone https://github.com/kendryte/k230_sdk.git cd k230_sdk # 下载工具链Linux和RT-Smart toolchain, buildroot package, AI package等 make prepare_sourcecode # 创建docker容器,$(pwd):$(pwd)表示系统当前目录映射到docker容器内部的相同目录下,将系统下的工具链目录映射到docker容器内部的/opt/toolchain目录下 docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) ghcr.io/kendryte/k230_sdk /bin/bash make mpp # (1)如果选择自行编译Linux+RT-Smart双系统镜像,执行下述命令 make CONF=k230_canmv_defconfig # (2)如果选择使用开发者社区下载的Linux+RT-Smart双系统镜像,请务必在k230_sdk根目录下执行如下命令以指定开发板类型 make CONF=k230_canmv_defconfig prepare_memory # (3)如果选择自行编译纯RT-Smart系统镜像,执行下述命令,开发者社区暂未开放纯RT-Smart镜像下载 make CONF=k230_canmv_only_rtt_defconfig
请您耐心等待镜像编译成功,
make mpp过程相比完整镜像编译过程耗时较少。对于Linux+RT-Smart双系统编译,在k230_sdk根目录/output/k230_canmv_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_defconfig/images ├── big-core ├── little-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
对于RT-Smart单系统编译,在k230_sdk根目录/output/k230_canmv_only_rtt_defconfig/images中下载编译好的镜像,并将其烧录到SD卡中,烧录步骤参考镜像烧录:
k230_canmv_only_rtt_defconfig/images ├── big-core ├── sysimage-sdcard.img # SD卡启动镜像 └── sysimage-sdcard.img.gz # SD卡启动镜像压缩包
在docker内部进入k230_sdk根目录,执行下述命令,编译ai demo部分:
cd src/reference/ai_poc # 如果build_app.sh权限不足,执行chmod +x build_app.sh # 执行脚本前确保src/big/kmodel/ai_poc下已经有相应kmodel、images、utils ./build_app.sh # 如果您想编译某一个demo,请使用“build_app.sh demo子目录名称”命令,比如: ./build_app.sh face_detection
执行build_app.sh脚本后,不同demo的编译生成产物在k230_bin目录下的子目录中;
将对应demo文件夹拷贝到开发板,在大核上执行sh脚本即可运行相应AI demo;
注:
对于Linux+RT-Smart双系统,sharefs是大小核共用目录,通过对大小核各自/sharefs目录的访问,提供了大核访问小核文件系统的功能。在实际使用中,通常会将大核的可执行程序存放在/sharefs目录下,大核通过sharefs功能执行这些程序,方便大核上应用程序的开发和调试;参考:K230大小核通讯Sharefs使用简介。
对于Linux+RT-Smart双系统,为了保证系统空间,最后一个disk的空间大小可能不足以存放所有文件;您可以使用下述命令修改最后一个分区大小;参考:K230 SDK常见问题解答 问题9。分区结束后,重启开发板,在小核sharefs下新建目录test_demo,选择读卡器拷贝或者scp拷贝,因传输较慢不推荐使用tftp拷贝;
umount /sharefs/ parted -l /dev/mmcblk1 # 31.3GB大小请参考上一条命令输出的 Disk /dev/mmcblk1 parted -a minimal /dev/mmcblk1 resizepart 4 31.3GB mkfs.ext2 /dev/mmcblk1p4 mount /dev/mmcblk1p4 /sharefs
对于Linux+RT-Smart双系统,您可以选择从嘉楠开发者社区->资料下载->K230->Images下载镜像烧录,k230_sdk版本和nncase版本对应关系请点击链接查看:K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com) 。镜像烧录请参考镜像烧录。开发者社区仅提供了Linux+RT-Smart双系统镜像,纯RT-Smart镜像需要您按照上述步骤自行编译;
对于RT-Smart单系统,拷贝文件时PC识别的根目录对应大核端的/sdcard目录,拷贝的文件请前往大核目录下/sdcard下寻找;
@You:
AI Demo章节旨在展示K230在AI领域的强大性能和广泛应用场景。虽然我们提供了相关源代码供用户参考,但这些源码多是基于特定Demo场景的实现。
对于希望深入了解K230人工智能开发流程的用户,建议学习快速入门K230_AI推理流程和深入解析AI开发流程。在这两章中,我们详细讲解了K230的多媒体应用、AI推理流程以及基于K230的人工智能开发流程,从代码层面全面解析了K230的AI开发知识。
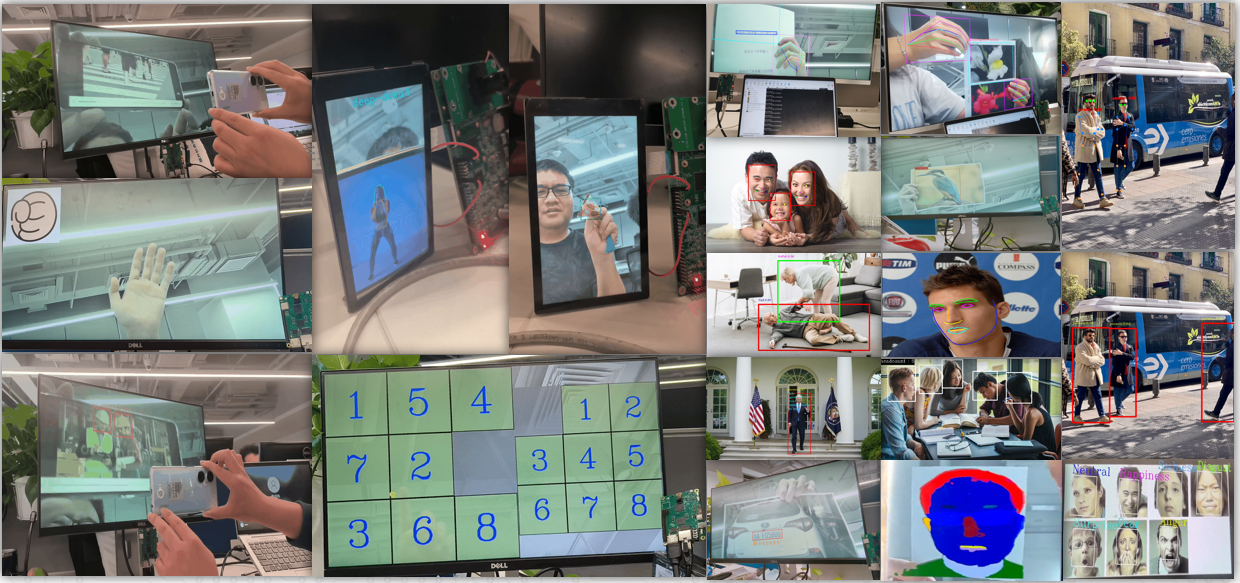
3.4. Demo效果集锦#
demo效果如下图所示,感兴趣的可以动手实践将demo跑起来。