K230 VICAP SENSOR 参数分区参考#
1. 概述#
1.1 概述#
ISP对sensor输出的信号进行实时处理的过程中,调优参数和标定参数对ISP处理方式以及图像的复原、增强有着关键的作用。在SDK中默认使用标定xml、auto json、manual json文件作为VICAP运行时导入的调优参数和标定参数配置。在快速启动模式下,默认参数导入方式耗时较高,因此提供了参数分区导入配置参数的方案。
本文档主要描述了制作参数分区及VICAP使用该分区的方法。
2. 制作流程参考#
2.1 流程图#
制作流程图如下:
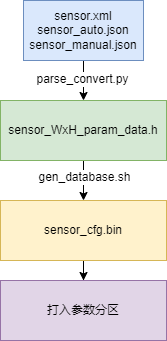
图2-1 参数分区制作流程图
制作步骤如下:
2.2 制作步骤#
2.2.1 转换头文件#
以senosr:IMX335,分辨率:2592x1944为例
拷贝参数文件到转换头文件的目录
cp k230_sdk/src/big/mpp/userapps/src/sensor/config/imx335-2592x1944.xml k230_sdk/src/big/mpp/userapps/src/vicap/src/isp/sdk/t_frameworks/t_database_c/calibration_data/
cp k230_sdk/src/big/mpp/userapps/src/sensor/config/imx335-2592x1944_auto.json k230_sdk/src/big/mpp/userapps/src/vicap/src/isp/sdk/t_frameworks/t_database_c/calibration_data/
cp k230_sdk/src/big/mpp/userapps/src/sensor/config/imx335-2592x1944_manual.json k230_sdk/src/big/mpp/userapps/src/vicap/src/isp/sdk/t_frameworks/t_database_c/calibration_data/
跳转至转换操作目录(工具源码及脚本存放目录)
cd k230_sdk/src/big/mpp/userapps/src/vicap/src/isp/sdk/t_frameworks/t_database_c/calibration_data/
执行转换头文件工具 parse_convert.py ,将拷贝的三个配置文件解析并转换为一个参数头文件(转换工具建议使用python3.x)
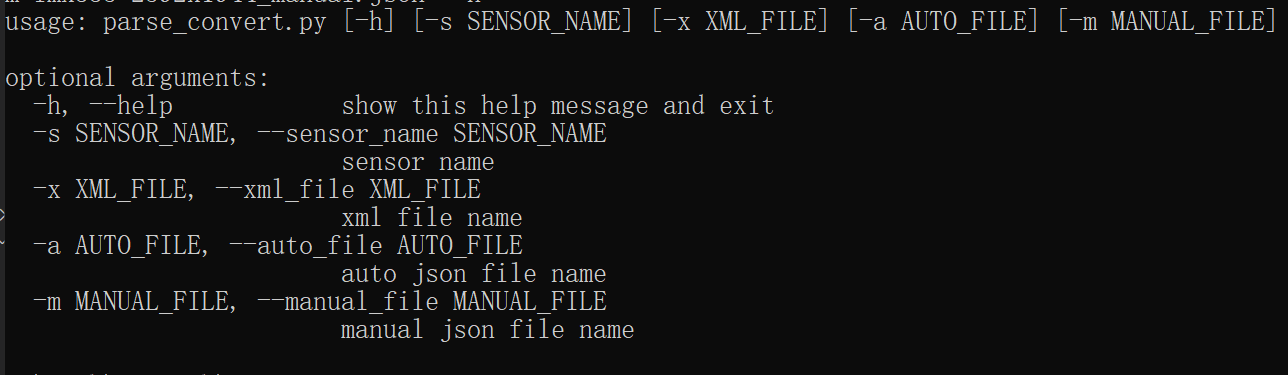
python parse_convert.py -s imx335 -x imx335-2592x1944.xml -a imx335-2592x1944_auto.json -m imx335-2592x1944_manual.json > imx335_2592x1944_param_data.h
#ifndef __IMX335_CALIBRATION_H__
#define __IMX335_CALIBRATION_H__
#include "isp_database.h"
#include "k_autoconf_comm.h"
static const TUNING_PARAM_T database_tuning_param =
{
/* calib data */
...
/* auto data */
...
/* manual data */
...
/* dewarp data */
...
/* version_info */
}
#endif
转换后将得到如上的结构体,共五个部分:
calib data、auto data、manual data分别由外部指定的配置文件解析生成
dewarp data需要根据实际配置替换在结构体中,参考dewarp参数配置
version info为转变换工具自动生成,描述sensor name以及创建日期
2.2.2 转换二进制文件#
二进制文件由header、配置参数、padding、dewarp参数四个文件拼接而成,考虑到参数分区的实际分配大小,建议最多添加三组配置文件
2.2.2.1 header制作#
修改 gen_database_param_bin_calib_header.c 中的FILENAME_00、FILENAME_01、FILENAME_02的定义,示例如下:
#define FILENAME_00 "imx335-2592x1944"
#define FILENAME_01 "ov9732-1280x720"
#define FILENAME_02 "ov9286-1280x720"
格式要求为驱动中对应的sensor名称-宽x高,如imx335-2592x1944的配置在驱动中对应的sensor name为imx335且分辨率为2592x1944,则修改FILENAME_0X为”imx335-2592x1944”,该定义将作为使用参数分区时的校验头,如果校验头不匹配,则会默认使用配置文件加载的方式进行读取,并在log中打印相应的警告提示,且校验头定义的名称唯一,不能重复。
可添加三组校验头,一旦顺序固定,则参数分区的顺序也需要与校验头同步,同步方法参考后文二进制文件制作。
修改定义后将该源码编译为可执行程序并执行,得到header: sensor_cfg_calib_header.bin
gcc -o main_header gen_database_param_bin_calib_header.c
./main_header
# 得到sensor_cfg_calib_header.bin
2.2.2.2 配置参数二进制文件制作#
修改 gen_database_param_bin.c 中的 DATABASE_SELECT定义,通过外部编译时传入不同参数制作不同的配置二进制文件,示例如下:
#if DATABASE_SELECT == 0
#include "imx335_2592x1944_param_data.h"
#elif DATABASE_SELECT == 1
#include "ov9732_param_data.h"
#elif DATABASE_SELECT == 2
#include "ov9286_param_data.h"
// will append new header file to convert bin, you can make DATABASE_SELECT++, build need add flag "-DDATABASE_SELECT=?, ?:0, 1, 2..."
#endif
DATABASE_SELECT的编号决定了不同sensor配置参数的排列顺序,此顺序需要与header的顺序进行同步。示例中imx335_2592x1944_param_data.h、ov9732_param_data.h、ov9286_param_data.h由三组xml json生成。
编译源码并执行
DATABASE_CURRENT_DIR=$PWD
DATABASE_CFLAGS="-I$DATABASE_CURRENT_DIR/../include \
-I$DATABASE_CURRENT_DIR/../../t_common_c/include/ \
-I$DATABASE_CURRENT_DIR/../../t_json_c/include/ \
-I$DATABASE_CURRENT_DIR/../../t_mxml_c/mxml-3.3.1/ \
-I$DATABASE_CURRENT_DIR/../../../../../../../../../include/comm"
gcc -o main_01 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=0
gcc -o main_02 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=1
gcc -o main_03 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=2
$DATABASE_CURRENT_DIR/main_01 0
$DATABASE_CURRENT_DIR/main_02 1
$DATABASE_CURRENT_DIR/main_03 2
# 得到文件sensor_cfg_00.bin(imx335)、sensor_cfg_01.bin(ov9732)、sensor_cfg_02.bin(ov9286)
编译多个执行程序,并执行,执行时传入的0 1 2参数为生成的二进制文件名中的序号。
2.2.2.3 padding生成#
padding文件存在的目的是为了后续dewarp参数的对齐,方便使用,padding长度会根据header+参数结构体的总长度进行变化,由脚本自动生成。
2.2.2.4 dewarp参数配置#
参数分区中定义了dewarp的lut表基本参数,根据此参数可在使用分区时正确的找到dewarp对应的lut文件
typedef struct {
uint8_t has_lut;
uint64_t lut_offset;
uint8_t split_enable;
uint16_t split_horizon_line;
uint16_t split_vertical_line_up;
uint16_t split_vertical_line_down;
} DEWARP_SPLIT_T;
has_lut: 是否存在dewarp lut文件,此成员设置为0则表示不需要使用dewarp参数,设置为1时表示需要使用dewarp参数
lut_offset: 当has_lut设置为1时,该成员生效,值将对应dewarp参数在参数分区中所在地址的偏移量,具体计算方法为 参数分区基地址 + header size + 参数结构体size + padding size,参数分区基地址在k_autoconf_comm.h中定义为CONFIG_MEM_SENSOR_CFG_BASE,该定义随编译的硬件不同有所改变。可通过sdk提供的gen_database.sh脚本进行计算,执行时会进行打印:
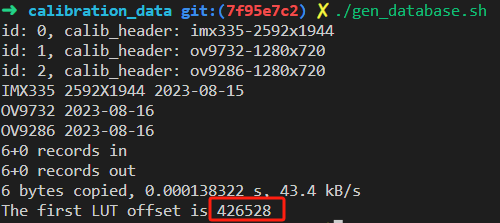
图2-2 参数分区自动计算dewarp偏移量
split_enable: 默认设置为0
split_horizon_line: 默认8191
split_vertical_line_up: 默认8191
split_vertical_line_down: 默认8191
dewarp的参数文件需要在制作脚本中指定路径,参考后文
示例如下分别为使用dewarp和不使用dewarp时的配置
// 使用dewarp的配置
/* dewarp data */
{
/* has_lut */
1,
/* lut_offset */
CONFIG_MEM_SENSOR_CFG_BASE + 426528, // 426528通过脚本计算得出
/* split_enable */
0,
/* split_horizon_line */
8191,
/* split_vertical_line_up */
8191,
/* split_vertical_line_down */
8191,
},
// 不使用dewarp的配置
/* dewarp data */
{
/* has_lut */
0,
/* lut_offset */
0,
/* split_enable */
0,
/* split_horizon_line */
8191,
/* split_vertical_line_up */
8191,
/* split_vertical_line_down */
8191,
},
2.2.2.5 合并文件#
通过2.2.2.1 - 2.2.2.4产出的文件如下:
文件名 |
描述 |
|---|---|
sensor_cfg_calib_header.bin |
header文件 |
sensor_cfg_0X.bin |
配置参数文件 |
padding.bin |
用于对齐的文件 |
imx335-2592x1944.bin |
dewarp参数文件,生成方法参考dewarp使用指南 |
合并上述文件得到最终用于参数分区的二进制文件 sensor_cfg.bin
cat sensor_cfg_calib_header.bin \
sensor_cfg_00.bin sensor_cfg_01.bin \
sensor_cfg_02.bin \
padding.bin \
../../../../../../../sensor/dewarp/imx335-2592x1944.bin > sensor_cfg.bin
按顺序,最后合并的文件为k230_sdk/src/big/mpp/userapps/src/sensor/dewarp中生成的dewarp参数文件,若添加新的dewarp参数文件,按顺序在末尾追加即可。
2.2.2.6 脚本化制作二进制文件#
sdk中提供了串联流程2.2.2.1 - 2.2.2.5的半自动化脚本 gen_database.sh ,用户在完成header、dewarp、参数解析的源码定义后,可通过执行该脚本进行制作,甚至不需要手动执行该脚本,直接编译sdk即可。
#!/bin/sh
DATABASE_CURRENT_DIR=$PWD
DATA_SAVE_PATH=../../../../../../../../../../../../tools/gen_image_cfg/data/
DATABASE_CFLAGS="-I$DATABASE_CURRENT_DIR/../include \
-I$DATABASE_CURRENT_DIR/../../t_common_c/include/ \
-I$DATABASE_CURRENT_DIR/../../t_json_c/include/ \
-I$DATABASE_CURRENT_DIR/../../t_mxml_c/mxml-3.3.1/ \
-I$DATABASE_CURRENT_DIR/../../../../../../../../../include/comm"
# DATABASE_SELECT 0: imx335 2592x1944, 1: ov9732 1280x720, 2: ov9286 1280x720, ...
echo -n
gcc -o main_01 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=0
gcc -o main_02 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=1
gcc -o main_03 gen_database_param_bin.c $DATABASE_CFLAGS -DDATABASE_SELECT=2
gcc -o main_header gen_database_param_bin_calib_header.c
$DATABASE_CURRENT_DIR/main_header
$DATABASE_CURRENT_DIR/main_01 0
$DATABASE_CURRENT_DIR/main_02 1
$DATABASE_CURRENT_DIR/main_03 2
rm $DATABASE_CURRENT_DIR/main_header
rm $DATABASE_CURRENT_DIR/main_01
rm $DATABASE_CURRENT_DIR/main_02
rm $DATABASE_CURRENT_DIR/main_03
FILE_LENGTH=$(wc -c < sensor_cfg_calib_header.bin)
FILE_LENGTH=$(expr $FILE_LENGTH + $(wc -c < sensor_cfg_00.bin))
FILE_LENGTH=$(expr $FILE_LENGTH + $(wc -c < sensor_cfg_01.bin))
FILE_LENGTH=$(expr $FILE_LENGTH + $(wc -c < sensor_cfg_02.bin))
PADDING_LENGTH=$(expr 16 - $FILE_LENGTH % 16)
dd if=/dev/zero of=padding.bin bs=1 count=$PADDING_LENGTH
echo "The first LUT offset is "$(expr $PADDING_LENGTH + $FILE_LENGTH)
cat sensor_cfg_calib_header.bin\
sensor_cfg_00.bin sensor_cfg_01.bin\
sensor_cfg_02.bin\
padding.bin\
../../../../../../../sensor/dewarp/imx335-2592x1944.bin > sensor_cfg.bin
2.2.2.6 打入参数分区#
制作二进制文件完成后,需要将该文件置于参数分区存放位置,该操作由sdk编译脚本完成,不需要用户自行操作。只需要在k230_sdk/src/big/mpp/userapps/src/vicap/src/isp/sdk/t_frameworks/t_database_c/calibration_data/中制作好文件即可在编译时自动打入。
2.2.3 使用方法#
在完成正确的制作流程后,通过VICAP提供的API进行使用
【说明】vicap 解析配置参数的模式
【定义】
typedef enum {
VICAP_DATABASE_PARSE_XML_JSON = 0,
VICAP_DATABASE_PARSE_HEADER = 1,
} k_vicap_database_parse_mode;
【成员】
成员名称 |
值 |
描述 |
|---|---|---|
VICAP_DATABASE_PARSE_XML_JSON |
0 |
使用xml、auto json、manual json模式 |
VICAP_DATABASE_PARSE_HEADER |
1 |
使用参数分区加载模式 |
【注意事项】 内部只校验0和1,其他值无效
【说明】vicap设置参数加载模式
【描述】
根据dev_num,设置不同vicap设备加载ISP参数的方式,默认为0
【语法】
k_s32 kd_mpi_vicap_set_database_parse_mode(k_vicap_dev dev_num, k_vicap_database_parse_mode parse_mode)
【参数】
参数名称 |
描述 |
输入/输出 |
|---|---|---|
dev_num |
VICAP设备号 |
输入 |
parse_mode |
参数加载模式 |
输入 |
【返回值】
返回值 |
描述 |
|---|---|
正值 |
成功。返回设备描述符 |
负值 |
失败,参考错误码定义。 |
【芯片差异】
无。
【需求】
头文件:mpi_vicap_api.h
库文件:libvicap.a
【注意】
需要在kd_mpi_vicap_init之前完成调用
【举例】
typedef enum {
VICAP_DEV_ID_0 = 0,
VICAP_DEV_ID_1 = 1,
VICAP_DEV_ID_2 = 2,
VICAP_DEV_ID_MAX,
} k_vicap_dev;
int ret = 0;
k_vicap_dev vicap_dev = VICAP_DEV_ID_0;
ret = kd_mpi_vicap_set_database_parse_mode(vicap_dev, VICAP_DATABASE_PARSE_HEADER);
if (ret) {
printf("kd_mpi_vicap_set_database_parse_mode failed, %d\n", ret);
return ret;
}
2.2.4 注意事项#
在生成参数头文件时,dewarp的结构体为默认值,需要根据实际情况填入,并计算偏移值,偏移值可以通过执行 gen_database.sh 来自动计算,计算后填入对应的位置
gen_database_param_bin.c 根据gcc -D的编译选项定义DATABASE_SELECT的值来决定包含哪组头文件并将其制作为参数文件,顺序要与header中定义的顺序编号相同
参数分区功能目前仅在spi nor flash模式下使用,其他模式无参数分区,即使加载也无法使用
header制作源码中对于FILENAME_0X的定义格式为:sensor_name-宽x高,该header会在VICAP内部使用时进行校验,VICAP内部采用拼接方式生成校验头进行对比,校验头格式为 驱动配置中使用的sensor_name-输入宽x输入高
转换工具与标定xml、auto json、manual json以及vicap版本匹配,不同版本不兼容
使用参数分区时,VICAP会根据当前使用的sensor配置以及设置的解析模式自行对参数分区进行校验,当校验成功后会取出该组参数进行加载,无需用户额外设置。当校验头对比失败时,自动切换回默认配置参数解析模式