1.使用说明#
1. 概述#
K230 CanMV是基于K230开发的一个可运行micropython的应用,用户可通过python语言使用硬件的各种资源。
CanMV源码下载地址如下:
https://github.com/kendryte/k230_canmv
https://gitee.com/kendryte/k230_canmv
2. 开发环境搭建#
2.1 支持的硬件#
CanMV-K230: 具体硬件信息参考 《K230_硬件设计指南》
2.2 编译环境#
主机环境 |
描述 |
|---|---|
Docker编译环境 |
提供了dockerfile,可以生成docker镜像,用于编译 |
Ubuntu 20.04.4 LTS (x86_64) |
可以在ubuntu 20.04环境下编译 |
K230 CanMV需要在linux环境下编译,支持docker环境编译,开发包中发布了docker file(k230_sdk/tools/docker/Dockerfile),可以生成docker镜像。具体dockerfile使用和编译步骤,详见4.3.1章节。
CanMV使用的Docker镜像以ubuntu 20.04为基础,如果不使用docker编译环境,可以在ubuntu 20.04主机环境下参考dockerfile的内容,安装相关HOST package和工具链后,编译CanMV。
K230 CanMV没有在其他Linux版本的主机环境下验证过,不保证可以在其他环境下编译通过。
3. 编译流程#
说明:本章节命令仅供参考,文件名请根据实际情况进行替换。
CanMV源码下载地址如下:
https://github.com/kendryte/k230_canmv
https://gitee.com/kendryte/k230_canmv
git clone https://github.com/kendryte/k230_canmv.git
cd k230_canmv
make prepare_sourcecode
# 生成docker镜像(第一次编译需要,已经生成docker镜像后跳过此步骤,可选)
docker build -f k230_sdk/tools/docker/Dockerfile -t k230_docker k230_sdk/tools/docker
# 启动docker环境(可选)
docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/k230_sdk/toolchain:/opt/toolchain -w $(pwd) k230_docker /bin/bash
# 默认使用CanMV板卡,如果需要使用其他板卡,请使用 make CONF=k230_xx_defconfig,支持的板卡在configs目录下
make CONF=k230_canmv_defconfig
编译完成后会在output/k230_xx_defconfig/images目录下生成sysimage-sdcard.img镜像
4. 镜像烧录#
4.1 ubuntu下烧录#
在sd卡插到宿主机之前,输入:
ls -l /dev/sd\*
查看当前的存储设备。
将sd卡插入宿主机后,再次输入:
ls -l /dev/sd\*
查看此时的存储设备,新增加的就是sd卡设备节点。
假设/dev/sdc就是sd卡设备节点,执行如下命令烧录sd卡:
sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync
说明:sysimage-sdcard.img可以是images目录下的sysimage-sdcard.img文件,或者sysimage-sdcard.img.gz文件解压缩后的文件。
4.2 Windows下烧录#
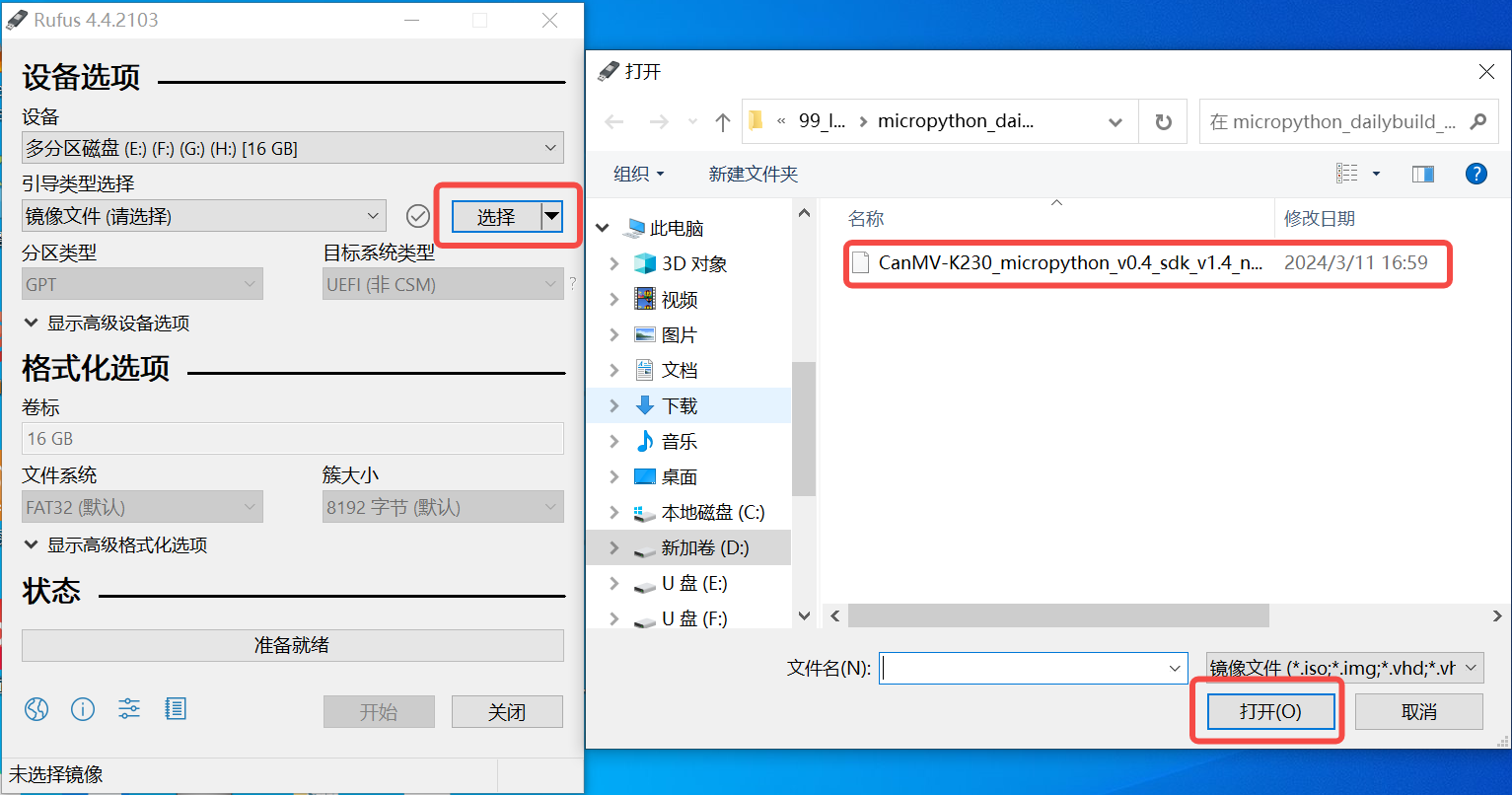
Windows下可通过rufus工具对TF卡进行烧录(rufus工具下载地址 http://rufus.ie/downloads/)。
1)将TF卡插入PC,然后启动rufus工具,点击工具界面的”选择”按钮,选择待烧写的固件。
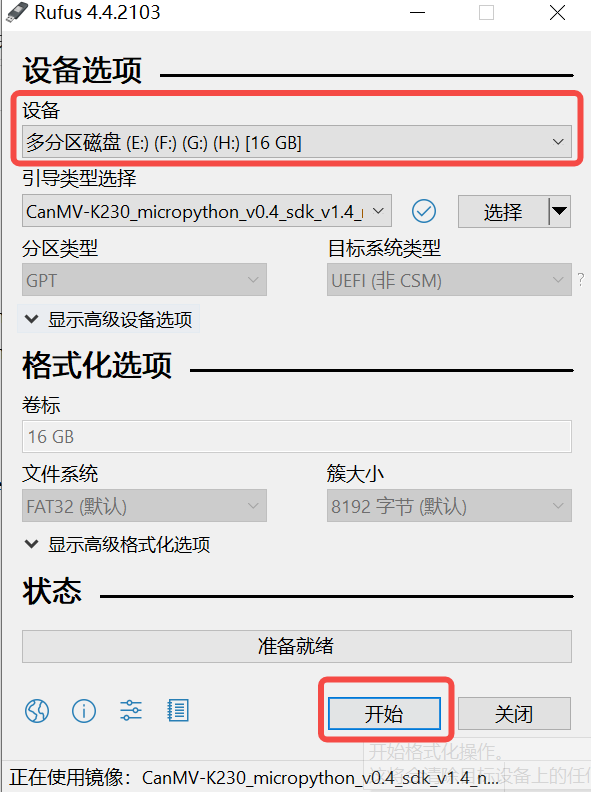
2)点击“开始”按钮开始烧写,烧写过程有进度条展示,烧写结束后会提示“准备就绪”。
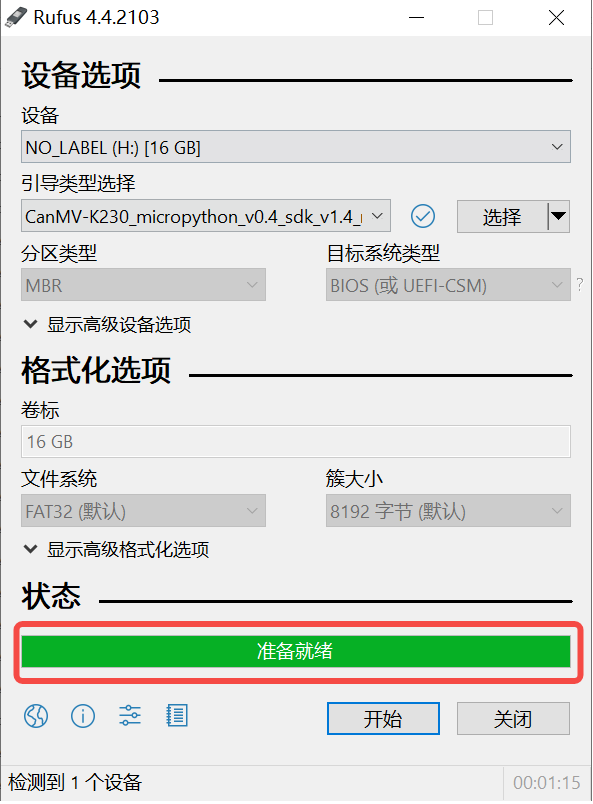
说明:sysimage-sdcard.img可以是images目录下的sysimage-sdcard.img文件,或者sysimage-sdcard.img.gz文件解压缩后的文件。
5. 上板测试#
5.1 开发板准备#
本章节以CanMV-K230为例
请准备如下硬件:
CanMV-K230
Typec USB线两根
SD卡
网线一根(可选)
HDMI转接线一根(可选)
CanMV-K230通过Power接口提供两路调试串口,linux下显示的串口设备为/dev/ttyACMx,windows下显示的串口设备为USB-Enhanced-SERIAL-A/B CH342。
windows驱动下载地址 https://www.wch.cn/downloads/CH343SER_EXE.html。
使用type C分别连接Power和USB接口,板子上电,可以发现三个USB串口设备。
linux串口显示:

/dev/ttyACM0为小核linux调试串口/dev/ttyACM1为大核rt-smart调试串口/dev/ttyACM2为micropython REPL串口,如果没有这个设备,请确定两个USB口都与电脑连接。
windows串口显示:
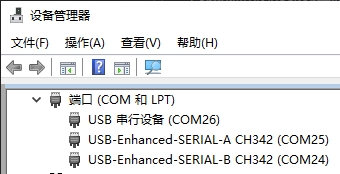
USB-Enhanced-SERIAL-A CH342(COM25)为小核linux调试串口USB-Enhanced-SERIAL-B CH342(COM24)为大核rt-smart调试串口USB串行设备(COM26)为micropython REPL串口,如果没有这个设备,请确定两个USB口都与电脑连接。
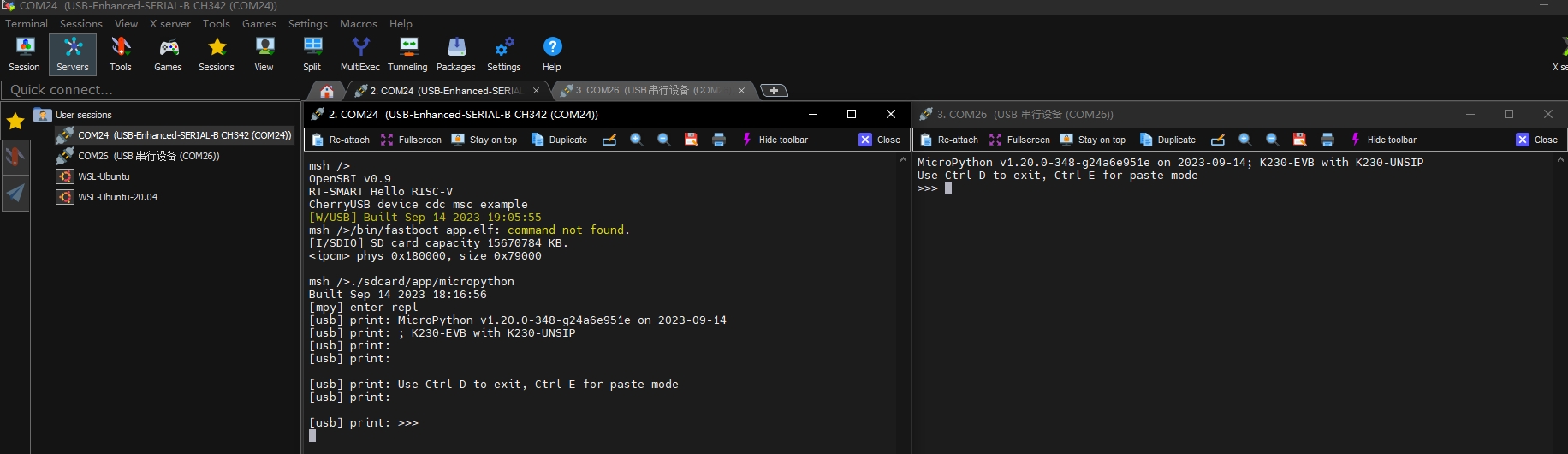
5.2 启动micropython#
打开大核rt-smart调试串口,打开micropython REPL串口,串口波特率设置
115200 8N1在大核rt-smart调试串口下输入
./sdcard/app/micropythonmicropython REPL串口会提示进入REPL
启动过程如下图所示
6. 目录结构#
k230_canmv
├── configs
├── fs_resource
├── images
├── k230_sdk
├── k230_sdk_overlay
├── micropython
├── output
└── scripts
目录介绍:
configs: 各种板级配置fs_resource: 在编译时拷贝到镜像中的资源文件k230_sdk: k230_sdk源码k230_sdk_overlay: 基于k230源码的修改micropython: micropython的移植output: 编译产物结果,镜像文件scripts: 各种辅助脚本
其中k230_sdk, micropython是git submodule, 子项目地址为:
k230_sdk: kendryte/k230_sdk.gitmicropython: micropython/micropython.git
k230_sdk_overlay中的目录结构与k230_sdk相同, 编译时会将k230_sdk_overlay同步到k230_sdk
output为编译生成目录
micropython目录大体如下:
micropython
├── micropython
├── overlay
├── port
│ ├── 3d-party
│ ├── Kconfig
│ ├── Makefile
│ ├── ai_cube
│ ├── ai_demo
│ ├── boards
│ ├── builtin_py
│ ├── core
│ ├── include
│ ├── kpu
│ ├── lextab.py
│ ├── machine
│ ├── maix
│ ├── modules
│ ├── mpconfigport.h
│ ├── omv
│ ├── socket_network
│ └── yacctab.py
└── sync.mk
目录介绍:
micropython: micropython源码overlay: 对micropython源码的一些修改patchport/boards: 各种板级配置port/core: micropython core模块port/machine: machine模块, 包含GPIO, SPI, IIC, UART, PWM, WDT等port/kpu: k230 kpu模块, 包含KPU, AI2Dport/mpp: k230 mpp模块, 包含VO, VI, AI, AO, MMZ, VPU, DPU等port/maix: k230 其他模块, 包含IOMUX, PM等port/omv: openmv模块port/include: 各模块头文件