K230 Scenario Practice - DPU Depth Camera POC#
K230 DPU Depth Camera#
Simulate the K230 device as a depth camera, transmitting the depth map processed by the internal DPU module to a PC in real-time. It supports multiple data transmission formats, multiple K230 devices, and stream/snap functions with stream performance reaching 720p@10fps.
Hardware Environment#
K230-USIP-LP3-EVB-V1.0/K230-USIP-LP3-EVB-V1.1/CanMV-k230-V1.0/CanMV-k230-V1.1 * 1
Specified sensor module * 1
A PC with Windows system
Two Type-C cables
Overview#
The DPU Depth Camera POC supports the following features:
PC-side support for capturing images in various formats: such as color images, depth maps, speckle patterns, infrared images, etc.
Support for stream/snap capture methods: can capture real-time data streams or a single frame image.
PC-side can connect multiple K230 devices, supporting simultaneous image capture from multiple K230 devices.
Transmission performance: In stream mode, each K230 device achieves 720p@10fps.
Frame rate control: Can set the number of frames transmitted per second.
Instructions#
Compile and burn the image: The compile command is
make CONF=k230_evb_dpu_depth_camera_defconfig. The generated image is located atoutput/k230_evb_dpu_depth_camera_defconfig/images/sysimage-sdcard.img. Burn this image, and the DPU depth camera program will run automatically after startup.Update the K230 device UVC driver to “WinUSB” on the PC: Refer to the introduction in the following sections.
Execute on the PC: First, download the files from the
k230_sdk/src/common/cdk/user/thirdparty/windows_uvc/lib_uvc/bin/x64/releasedirectory to the PC. Then execute therun.batfile in this folder. You can modify the content of the batch file to execute different functions. Therun.batfile uses thetest_uvc.execommand to execute different functions. Thetest_uvc.execommand is as follows:
Usage: grab stream frame Usage: %s -s 0 -m 0 -f ./bin/0702/H1280W720.bin -t 0 -a 19 -b 20 -n "0701".
snap frame Usage: %s -s 1 -m 1 -f ./bin/0702/H1280W720.bin -t 0.
transfer file Usage: % s -m 2 -i ./bin/H1280W720_conf.bin -o /sharefs/H1280W720_conf.bin.
-s <local filepathname>: save frame data to local file
-m <work mode>: work mode. 0:grab data, 1:snap data, 2:tranfer file
-i <local filepathname>: transfer local filename.
-o <remote filepathname>: k230 receive filename.
-f <ref/cfg filepathname>: k230 update ref/cfg file.
-t <dpu image mode>: dpu image mode.
-r <fps>: set fps.
-a <sensor type0>:sensor type0,default is 20,see vicap doc.
-b <sensor type1>:sensor type1,default is 19,see vicap doc.
-n <init serialnumber>:init seialnumber,default is 0701.
-d <gdma rotate>:0: Rotate 0, 1: Rotate 90, 2: Rotate 180, 3:Rotate 270. evb Rotate 90 and canmv Rotate 270.
Update Driver#
After downloading the files from the k230_sdk/src/common/cdk/user/thirdparty/windows_uvc/lib_uvc/bin/x64/release directory to the PC, please update the UVC driver on Windows before running the batch script.
Ensure the K230 big and small cores start normally and simulate it as a USB device. Connect the K230 OTG port to the PC USB port using a Type-C cable.
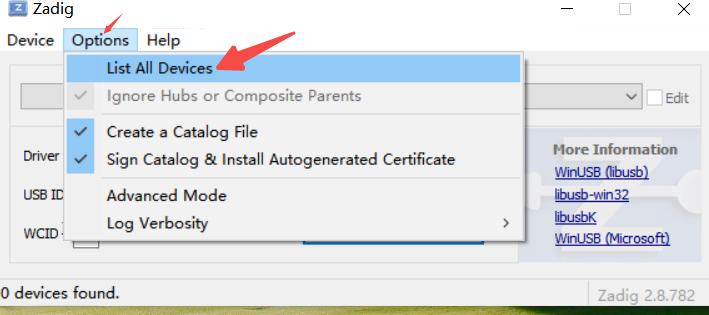
Double-click the
zadig-2.8.exesoftware in the release directory. After opening, click the menu bar: Options->List All Devices, and select this option.
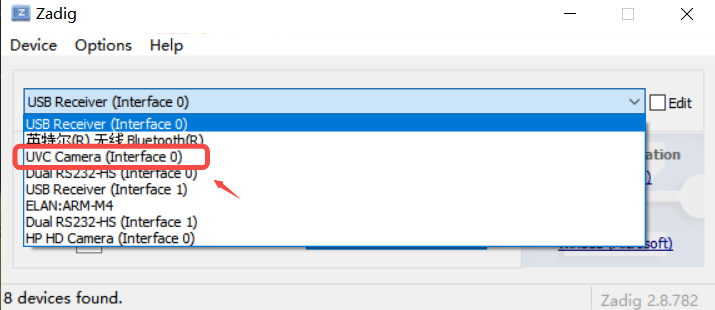
Select the K230 UVC device from the drop-down list, named “UVC Camera (interface 0)”.
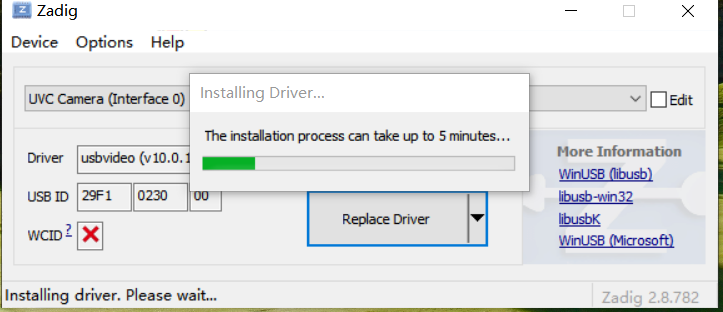
If the Windows driver for this device has not been updated, Windows will default to installing the “usbvideo” driver. In this case, it needs to be replaced with the “WinUSB” driver. Click the “Replace Driver” button to replace the driver.
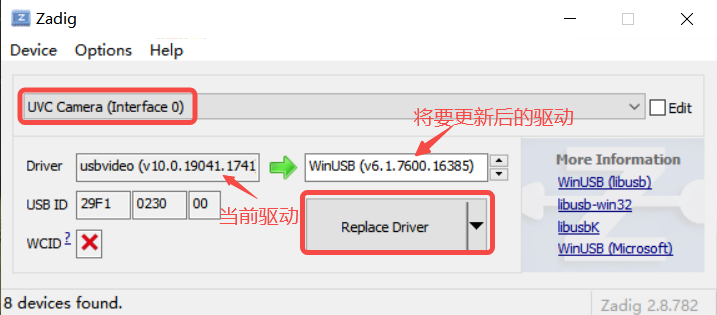
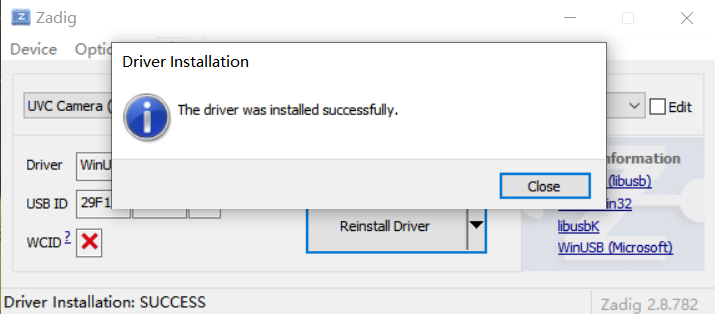
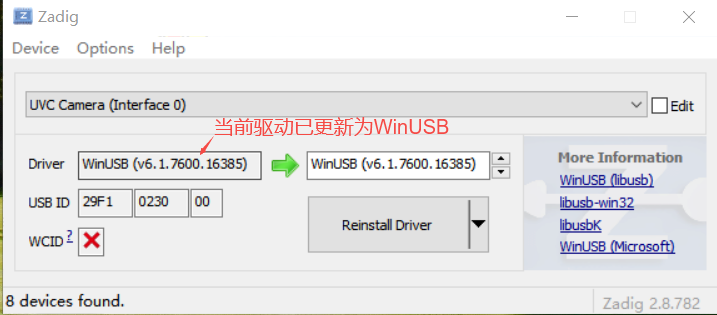
As shown in the above image, the “WinUSB” driver has been successfully installed. At this point, select the K230 UVC device again from the drop-down list, named “UVC Camera (interface 0)”, and it will show that the currently installed driver is “WinUSB”.
Function Demonstration#
Obtain depth and color images from the K230 device: Modify the
run.batto the following command. Please replaceH1280W720.binwith the file matching the sensor module. Depth and color images will be generated in the./datafolder in real-time.test_uvc.exe -m 0 -s 1 -a 36 -b 35 -f "./bin/canmv/05/H1280W720.bin" -t 0 -n "2405-05"
Capture one depth and color image per second from the K230 device. Please replace
H1280W720.binwith the file matching the sensor module. Depth and color images will be generated every second in the./datafolder.test_uvc.exe -m 1 -s 1 -a 36 -b 35 -f "./bin/canmv/05/H1280W720.bin" -t 0 -n "2405-05"
Frame rate control, set to transmit 2 frames per second.
test_uvc.exe -m 1 -s 1 -a 36 -b 35 -f "./bin/canmv/05/H1280W720.bin" -t 0 -n "2405-05" -r 2